18. Interface specifications
MiR1000 User Guide (en) 12/2020 - v.1.4 ©Copyright 2019-2020: Mobile Industrial Robots A/S. 199
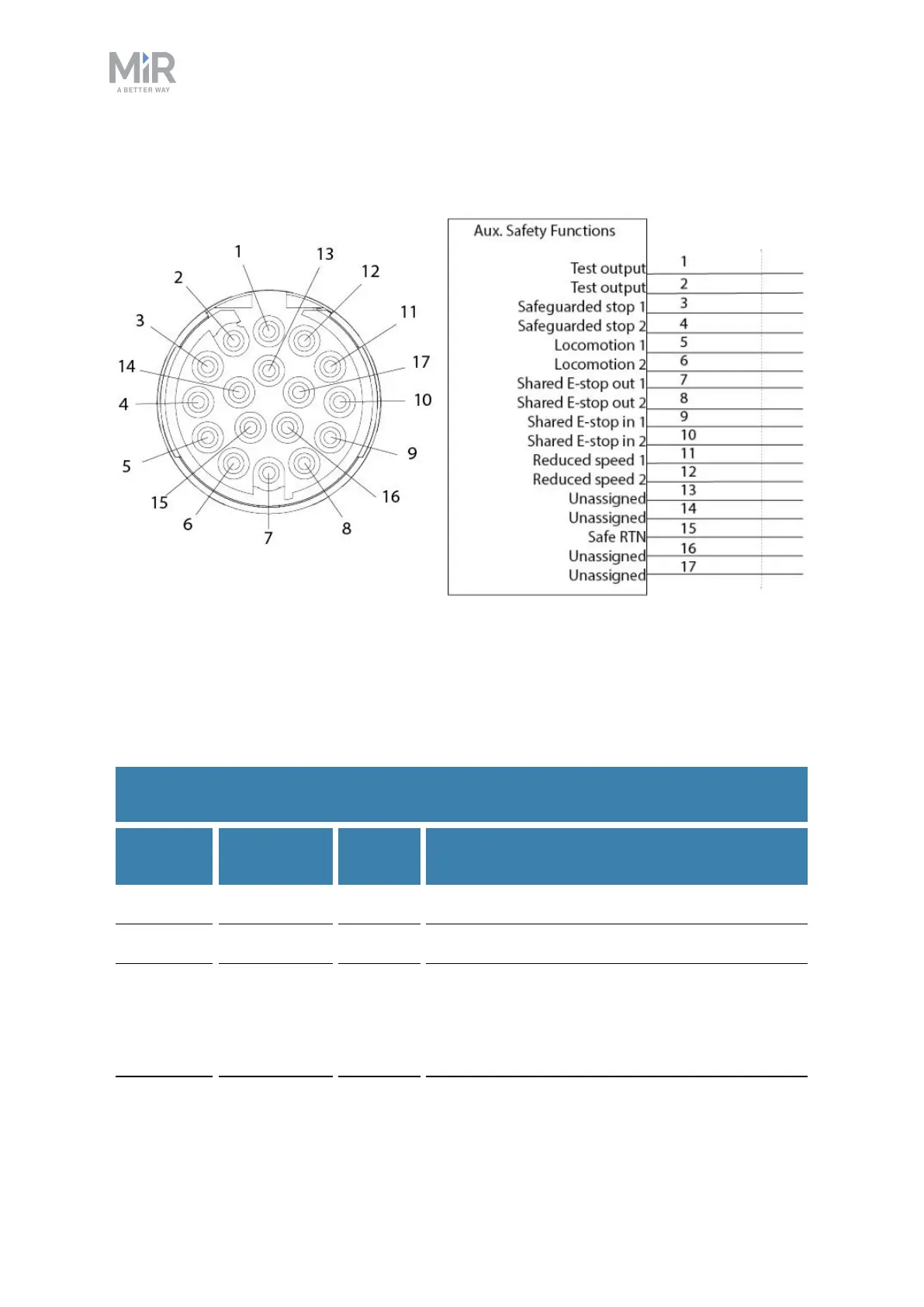
Auxiliary safety functions
Figure 18.7. Pin numbers: female connector viewed from the front (left) and wiring diagram (right).
The Auxiliary safety functions interface is designed to support safety functions that can
trigger a Protective stop—see Safety system on page 77.
Table 18.5 contains the description of the pins of the Auxiliary safety functions interface.
Pin
number
Signal
name
Type Description
1 Test output Output 24 V output.
2 Test output Output 24 V output.
3 Safeguarded
stop 1
Input When inactive, the robot enters Protective stop.
If pins are unequally set for a period greater
than three seconds, the robot must be
restarted.
Table 18.5.
Description of the pins in the Auxiliary safety functions interface