8. Safety system
MiR200 User Guide (en) 10/2020 - v.3.1 ©Copyright 2017-2020: Mobile Industrial Robots A/S. 75
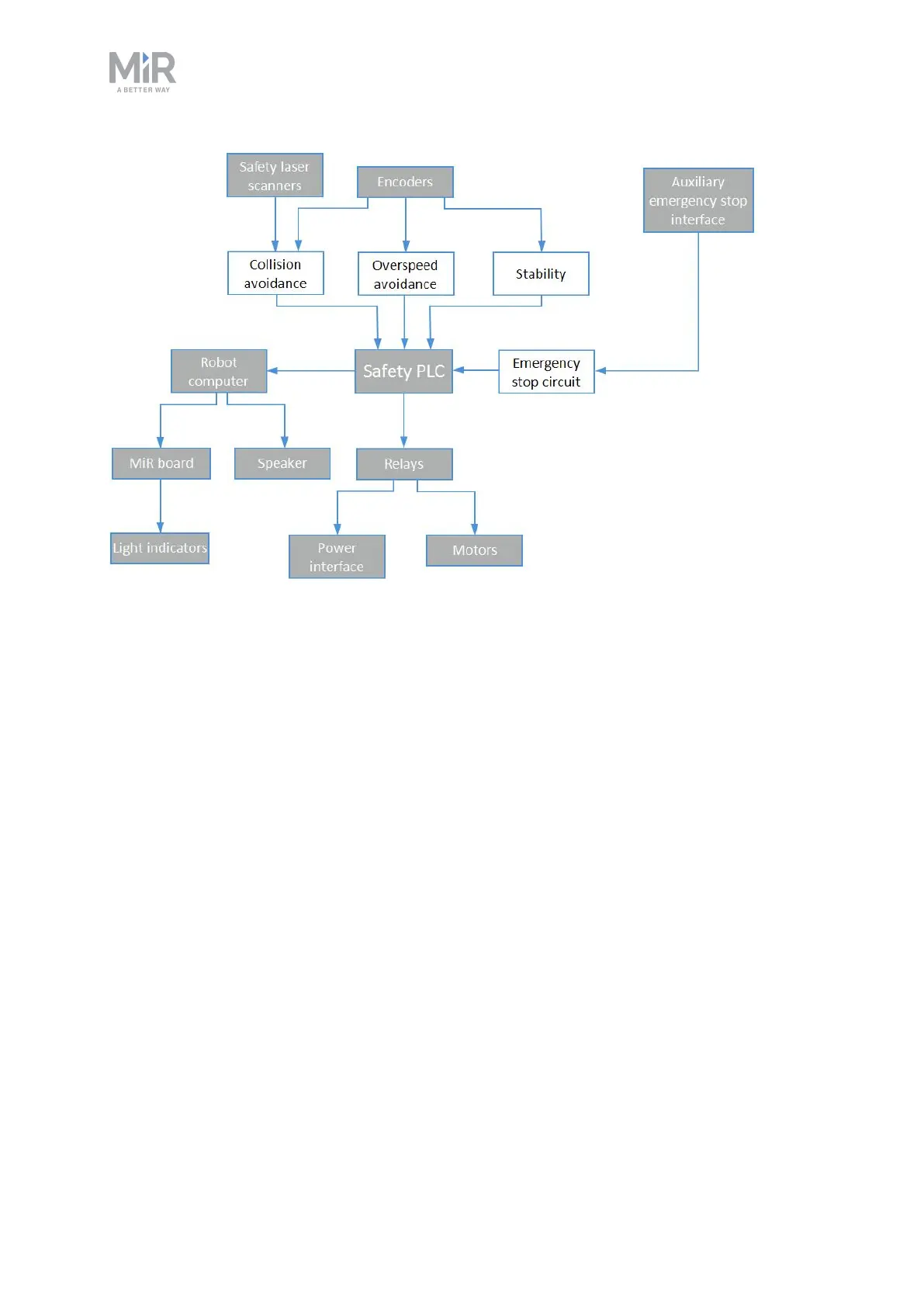
Figure 8.1. Overview of components involved in each safety function and interface. When a safety function is
triggered, the safety PLCswitches the STO and brake relays so the brakes, motors, and safe power supply to the
top module no longer receive power.
8.2 Collision avoidance
The collision avoidance function prevents the robot from colliding with personnel or
obstacles by stopping it before it collides with any detected obstacles. It does this using the
safety laser scanners.