11. Electrical interfaces
MiR250 Dynamic Integrator Manual (en) 09/2023 - v.2.1 ©Copyright 2020–2023: Mobile Industrial Robots A/S. 108
Pin no. Description
8 Not connected to the robot
9 Not connected to the robot
10 Not connected to the robot
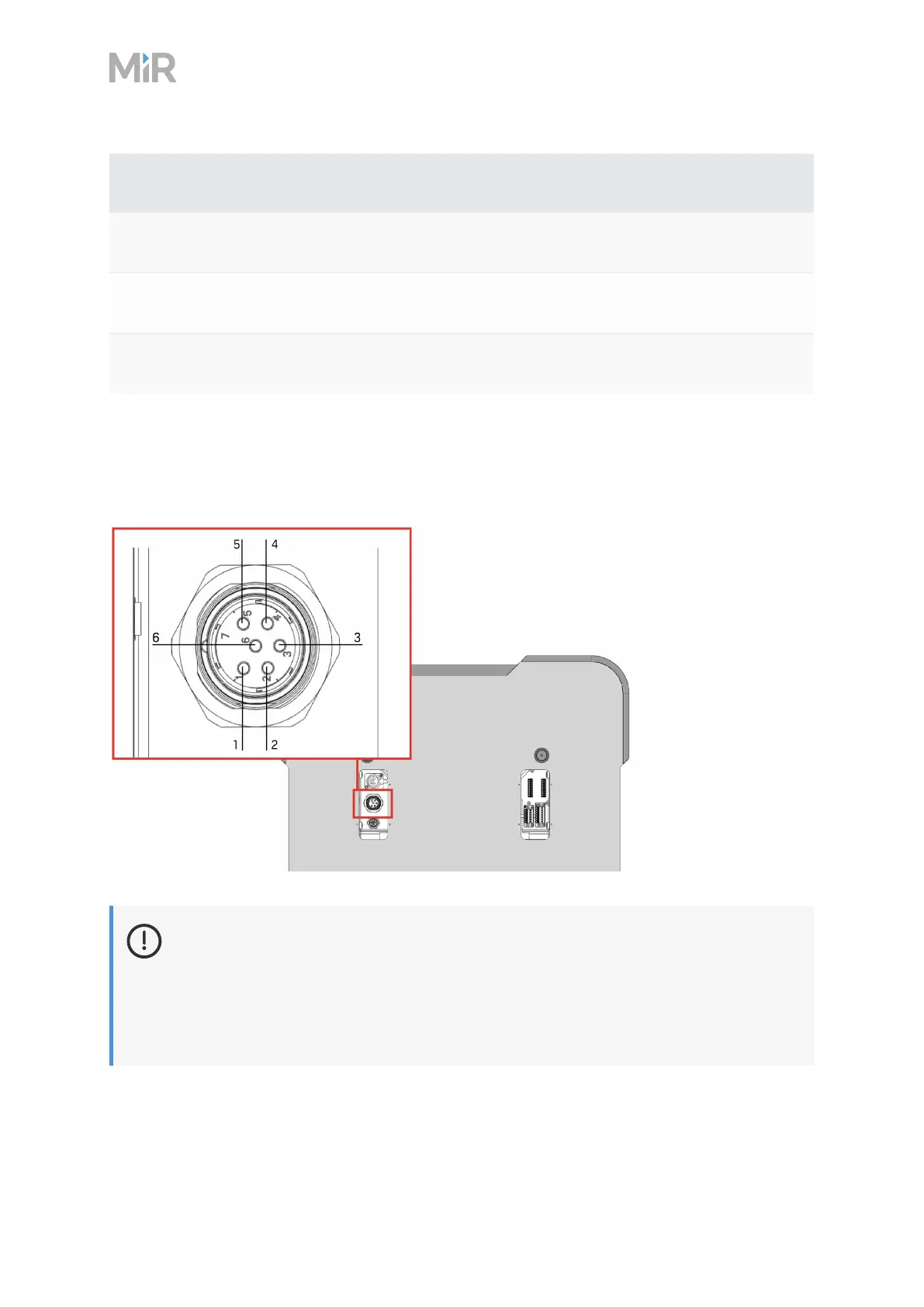
Power
Figure 11.2 The pins of the Power interface
NOTICE
Connecting power and ground signals to the chassis while stacking the 24V and 48V
power supplies can lead to severe damage to the robot.
l
Never connect power and ground signals to the chassis, and never stack the 24V
and 48V power supplies.
 Loading...
Loading...











