8. Safety-related functions and interfaces
MiR250 Dynamic Integrator Manual (en) 09/2023 - v.2.1 ©Copyright 2020–2023: Mobile Industrial Robots A/S. 86
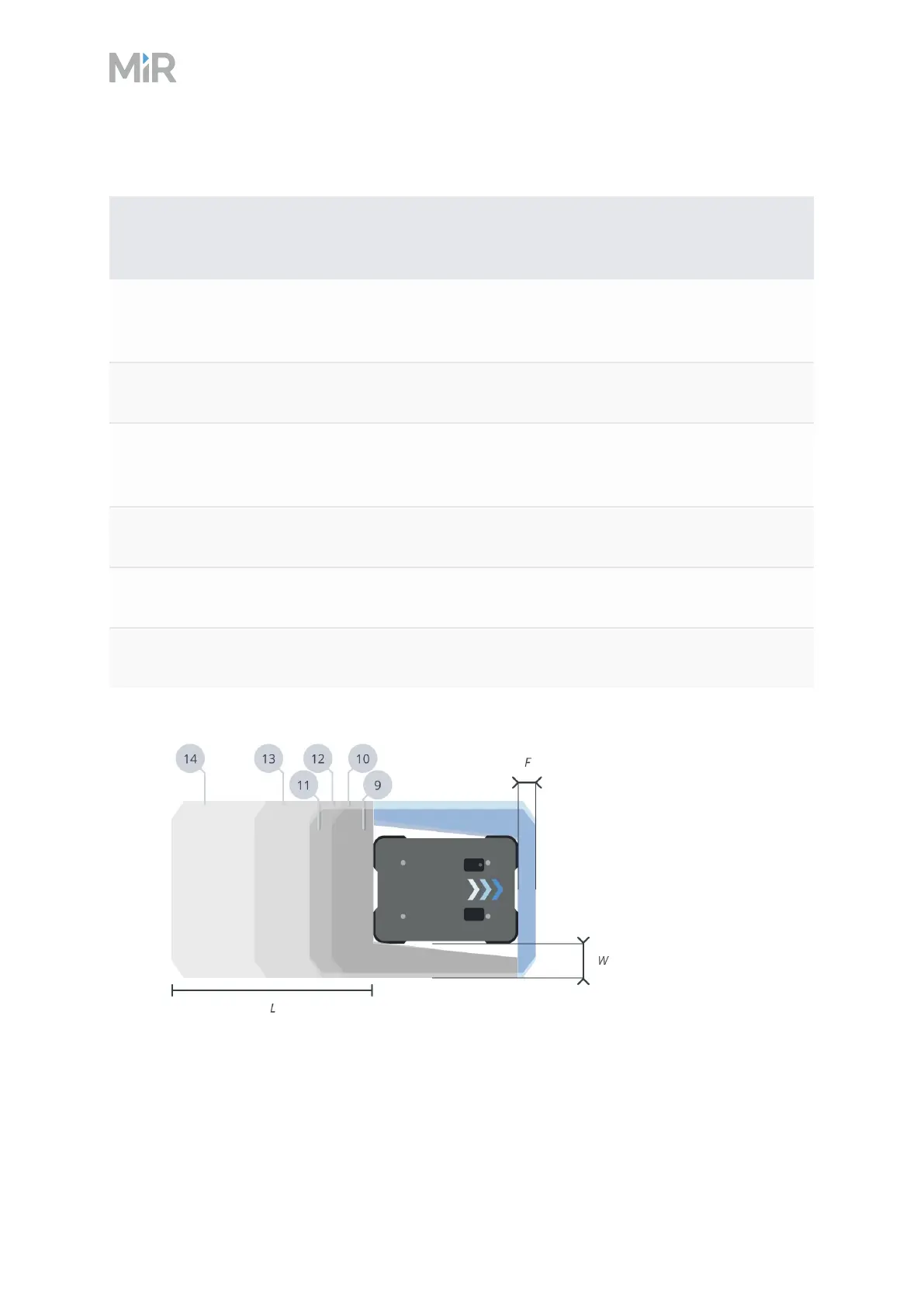
Case Speed Rear field
length (L)
Field width
(W)
Front field
length (F)
9 0.00 to 0.30 m/s and
less than 15deg/s
235mm 170mm 105mm
10 0.00 to 0.30 m/s 235mm 210mm 105mm
11 0.30 to 0.50 m/s and
less than 15deg/s
345 mm 170mm 105mm
12 0.30 to 0.50 m/s 345 mm 210mm 105mm
13 0.50 to 0.90m/s 655mm 210mm 105mm
14 0.90 to 1.30m/s 1 095mm 210mm 105mm
Table 8.3 Range of the robot's Protective fields within its backward speed interval cases
Figure 8.3 The Protective field contours when the robot drives backward