FX Series Programmable Controllers Points Of Technique 10
10-10
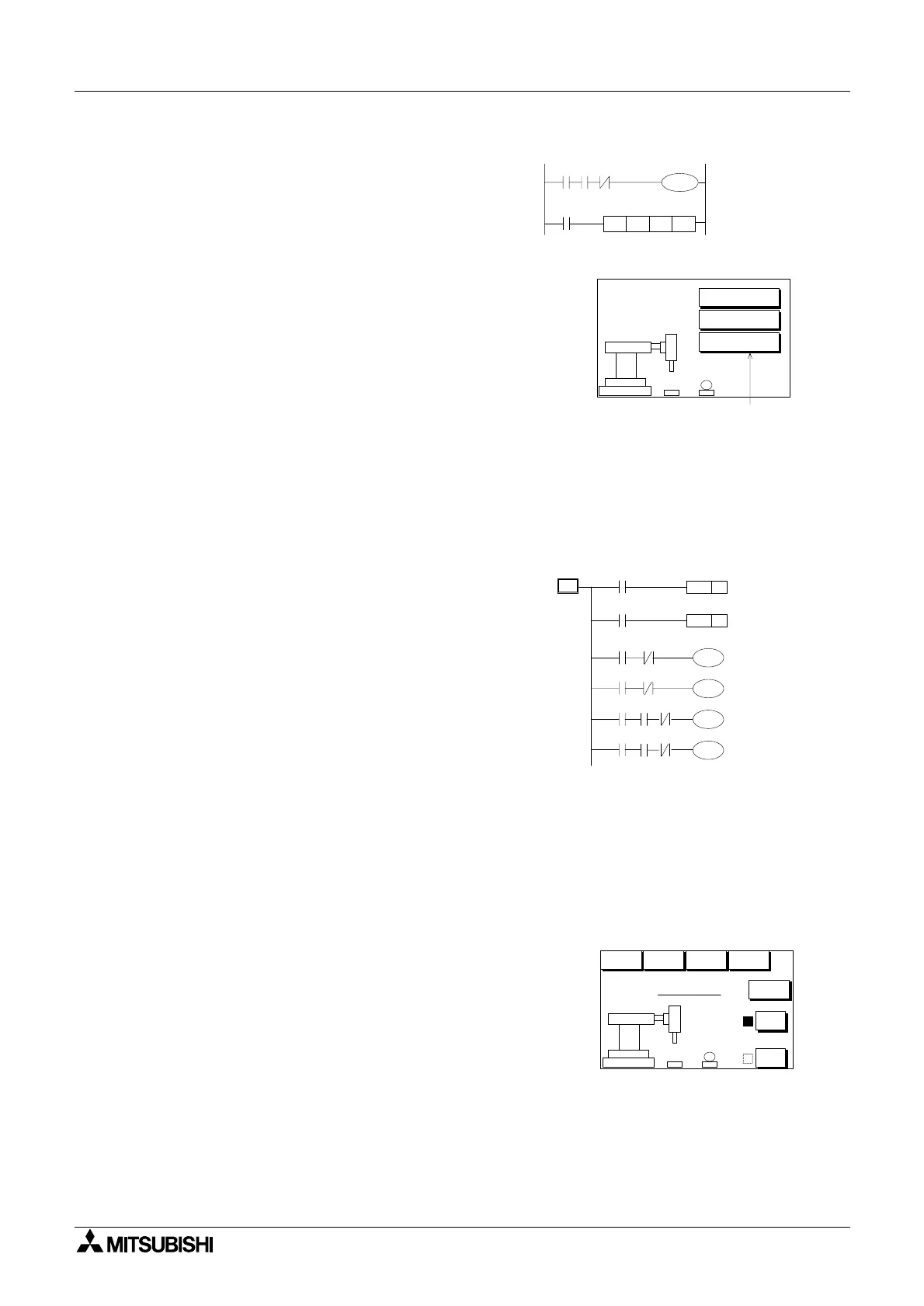
This example uses the IST instruction (FNC 60) to
control the operation mode of the robot arm. The
program shown opposite identifies how the IST
instruction is written into the main program.
WhentheISTinstructionisusedthereare5
selectable modes which access three separate
programs. This example has the following
programs associated with its modes. Each mode is
selected through the FX-40DU-TK. The screen
shown opposite is the initial mode menu. Each of
the menu options causes a screen jump to the
selectedmode.Menuoptions1and3alsosetON
auxiliary devices M30 and M31 respectively.
The active bits then trigger a screen change to the
selected mode. Please note 'Automatic' has three
further modes which are selected from a following
screen/display.
Manual Mode:
In this mode ALL operations of the robot arm are
controlled by the operator. An operation or
movement is selected by pressing the
corresponding option on the DUs screen (see
below). These options then trigger DU SWITCH
objects which drive associated auxiliary relays
within the programmable controller. The SWITCH
objects should be set to momentary so that they
only operate when the key is pressed.
The status of the clamping action could be
identified by two INDICATOR (SCR) functions on
the DU unit. They could be monitoring the ON and
OFF status of the clamp output Y1. Hence, when
the clamp was ON a single black box opposite the
ON button could appear. When the clamp is OFF
the box would appear in front of the OFF button. At
any one time only one box would be active.
Key assignment for DU screen opposite:
Up = M15 Down = M20
Left = M16 Right = M21
Clamp ON = M22
Clamp OFF = M17
Menu = reset M30
Once manual operation is completed the operator can return to the main mode selection
screen by touching the 'Menu' key. This causes the manual mode bit flag, M30, to be reset.
Once M30 is reset the DU screen then changes back to the desired mode selection screen.
X4
X2
Y1
M8000
IST M30 S27S20
M8044
When all conditions
are met robot grip is
at zero point -
M8044 = ON
IST control - setup
Mode Selection
3. Z Return
AB
1. Manual
2. Automatic
Touch screen keys
An example DU screen design
M22
M17
S0
M15 Y0
M20
Y2
Y3
M16
X2
Y4
M21
X2
SET
Y1
RST
Y1
Y2
Y0
Y4
Y3
Clamp is active
Clamp is not
active
Move grip up
Move grip down
Move grip left
Move grip right
Manual Mode
AB
Up
Clamp
Down Left Right
OFF
ON
Menu
 Loading...
Loading...



