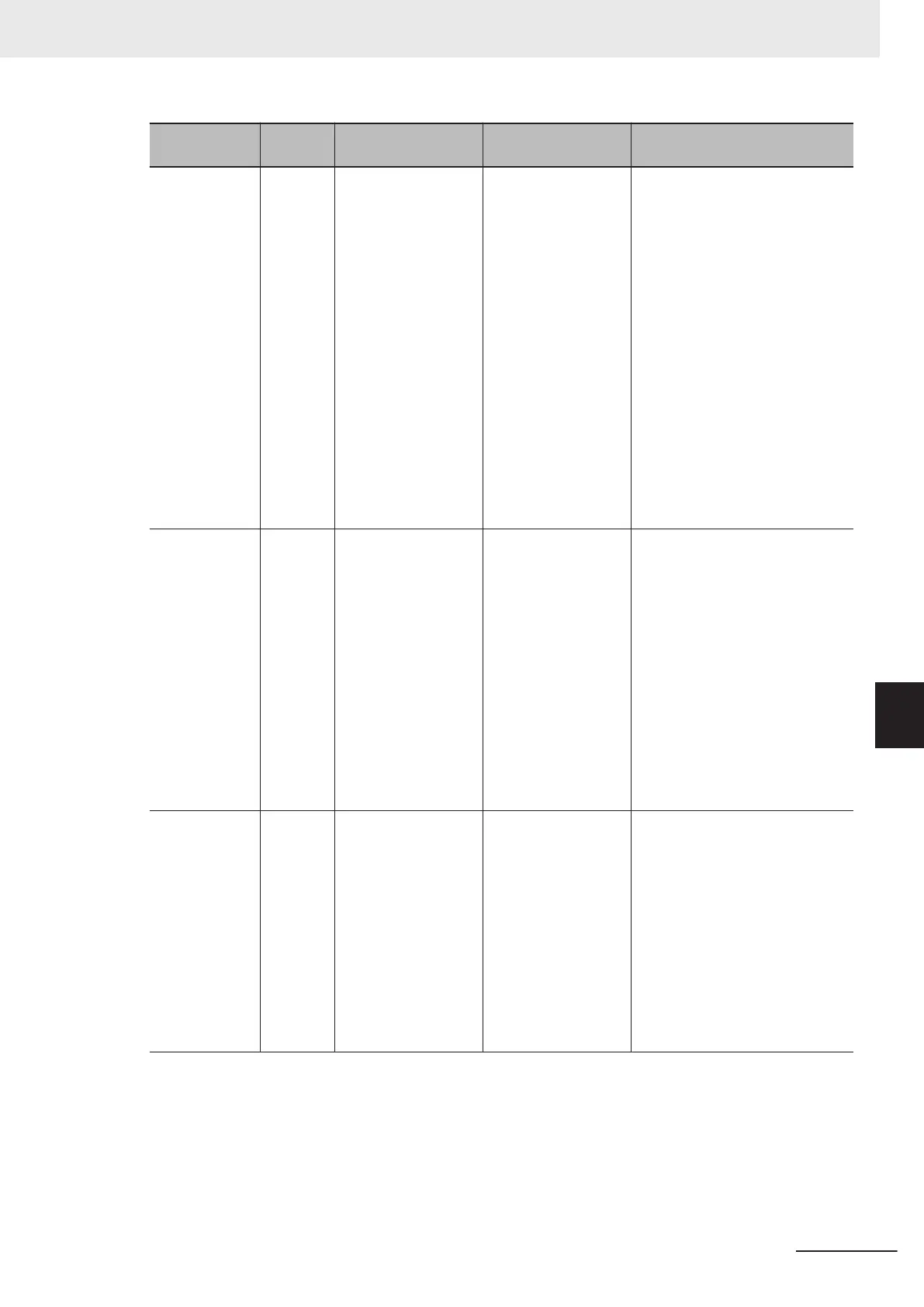
Item No.
Parame-
ter No.
Item Range Display item
3_08 W110 Motor Speed
0.00 to 9999 [r/min]
1000 to 9999 [10r/
min]
The rotation speed is displayed
as “output frequency (Hz) × 120/
Number of motor poles".
If the monitor value is 10000 or
above, the x10 LED lights up and
the value of “monitor value/10" is
displayed.
• Value converted from the V/f
control and frequency before
dynamic torque vector control
slip compensation based on
the number of poles
• V/f with speed sensor, vector
with speed sensor: Motor
speed detection value
• V
ector without speed sensor:
Motor rotation speed estimated
value
3_09 W111 Load Shaft Speed
0.00 to 9999 [r/min]
1000 to 9999 [10r/
min]
The load speed is calculated by
multiplying the output frequency
by (1st Frequency Conversion
Coefficient (E50) / Display Coeffi-
cient 1 for T
ransport Time / Auxili-
ary Display Coefficient 1 for
Speed Monitor (E39)) and dis-
played.
Load speed = Output frequency ×
(E50 / E39)
If the monitor value is 10000 or
above, the x10 LED lights up and
the value of “monitor value/10" is
displayed.
3_10 W11
PID Process Com-
mand
-999 to 9990
The PID command value is con-
verted using PID Control Maxi-
mum Scale (J106) and PID Con-
trol Minimum Scale (J107) and
displayed.
Display value = (PID process
command (%)/100) × (Display
maximum value - Display mini-
mum value) + Display minimum
value
If PID control is disabled,
“----------” is displayed.
7 Other Functions
7-5
M1 Series Standard Type User's Manual (I669)
7-1 Status Monitors
7
7-1-1 Operation Monitor
 Loading...
Loading...









