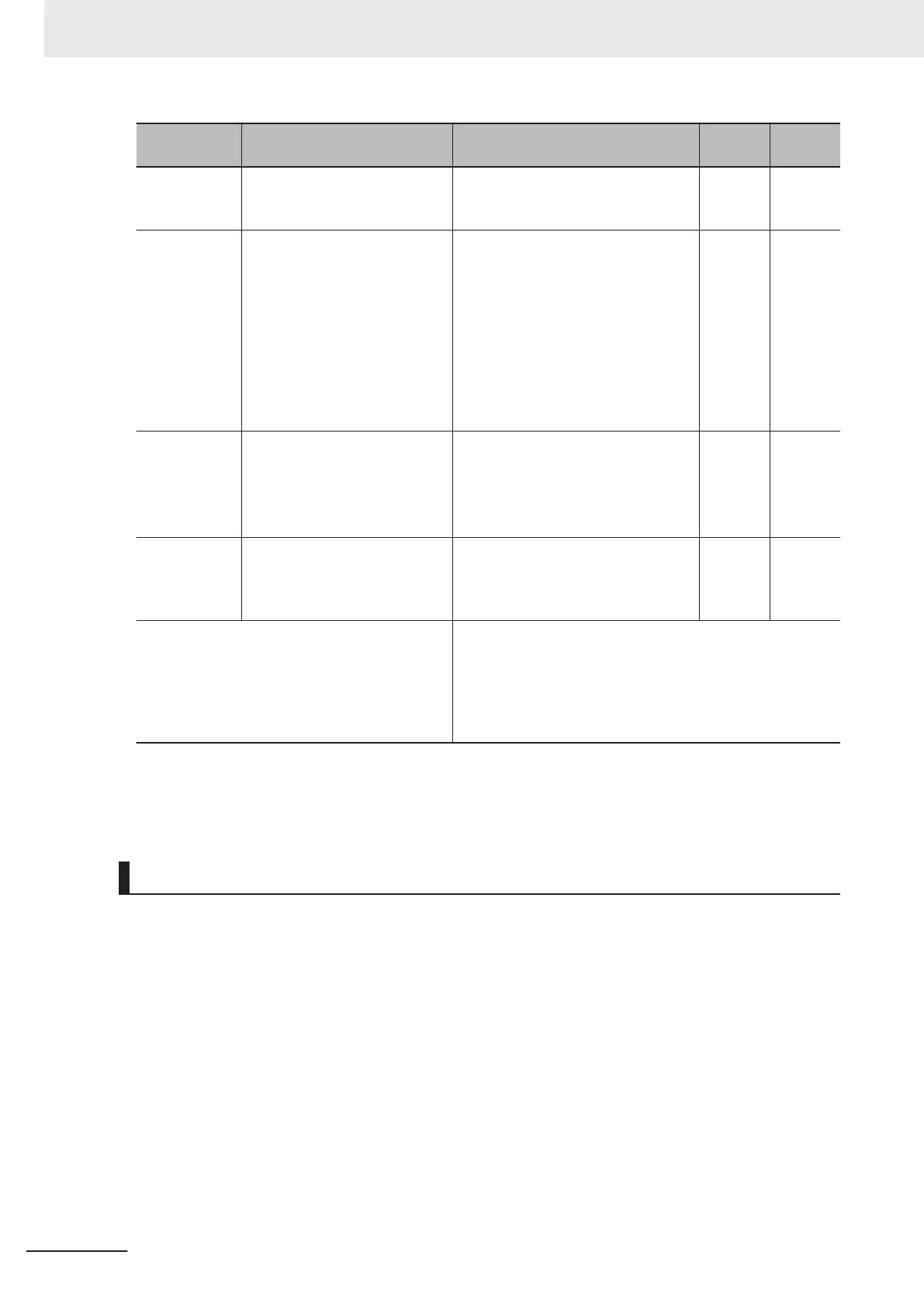
Parameter
No.
Function name Data
Default
data
Unit
W132
*1
PID Control PID Deviation (No
Scale Transformation)
-32768 to 32767
-20000 = -100%
+20000 = +100%
0 -
E01 to E05,
E98, E99
Input T
erminal [DI1] to [DI7]
Function Selection
20: PID (PID control cancellation)
21: IVS (Normal/Inverse switching)
33: PID-RST (Switch normal/inverse
operation)
34: PID-HLD (Hold PID integral com-
ponent hold)
171: PID-SS1 (PID control multistage
command 1)
172: PID-SS2 (PID control multistage
command 2)
- -
E20, E21, E27
Output Terminal [DO1] Function
Selection, Output T
erminal
[DO2] Function Selection, Out-
put Terminal [ROA, ROB] Func-
tion Selection
42: OD (Excessive PID deviation)
43: PID-CTL (Under PID control)
44: PID-STP (Under sleep mode of
PID control)
*2
186: FBV (PID FB status output)
-
-
E61, E62, E63
Input Terminal [AI2] Function
Selection (AII) (E62)/Input T
er-
minal [AI2] Function Selection
(AIV) (E63)
21 : PID feed forward - -
Related function
Output T
erminal [DO1] ON Delay Time (H309)
Output Terminal [DO2] ON Delay Time (H31
1)
Output Terminal [ROA, ROB] ON Delay Time (H313)
Output Terminal[DO1] OFF Delay Time (H310)
Output Terminal[DO2] OFF Delay Time (H312)
Output Terminal [ROA, ROB] OFF Delay Time (H314)
*1. It can be referenced or set only from the communications function or Sysmac Studio.
*2. The OFF delay of the Under sleep mode of PID control (44: PID-STP) terminal becomes the time obtained
by adding 0.1 s to Output Terminal [DO1] OFF Delay Time (H310), Output T
erminal [DO2] OFF Delay Time
(H312) and Output Terminal [ROA, ROB] OFF Delay Time (H314).
PID Control Function Selection
PID control is enabled by setting other than 0 to PID Control Function Selection (J01).
•
PID Control Function Selection (J01) = “1: Process normal operation,” “2: Process inverse opera-
tion”
If the PID process control is performed and PID calculation results are negative, the frequency refer-
ence to the inverter is limited at 0 Hz.
•
PID Control Function Selection (J01) = “4: Process normal operation, opposite operation available,”
“5: Process inverse operation, opposite operation available”
If the PID process control is performed and PID calculation results are negative, an opposite opera-
tion can be performed for the inverter
. PID Control PID Output Variable Range for Process Control
(E120) is disabled.
• PID Control Function Selection (J01) = “3: Dancer”
PID dancer control is performed. Opposite operation can be done for dancer control.
7 Other Functions
7-126
M1 Series Standard Type User's Manual (I669)
 Loading...
Loading...









