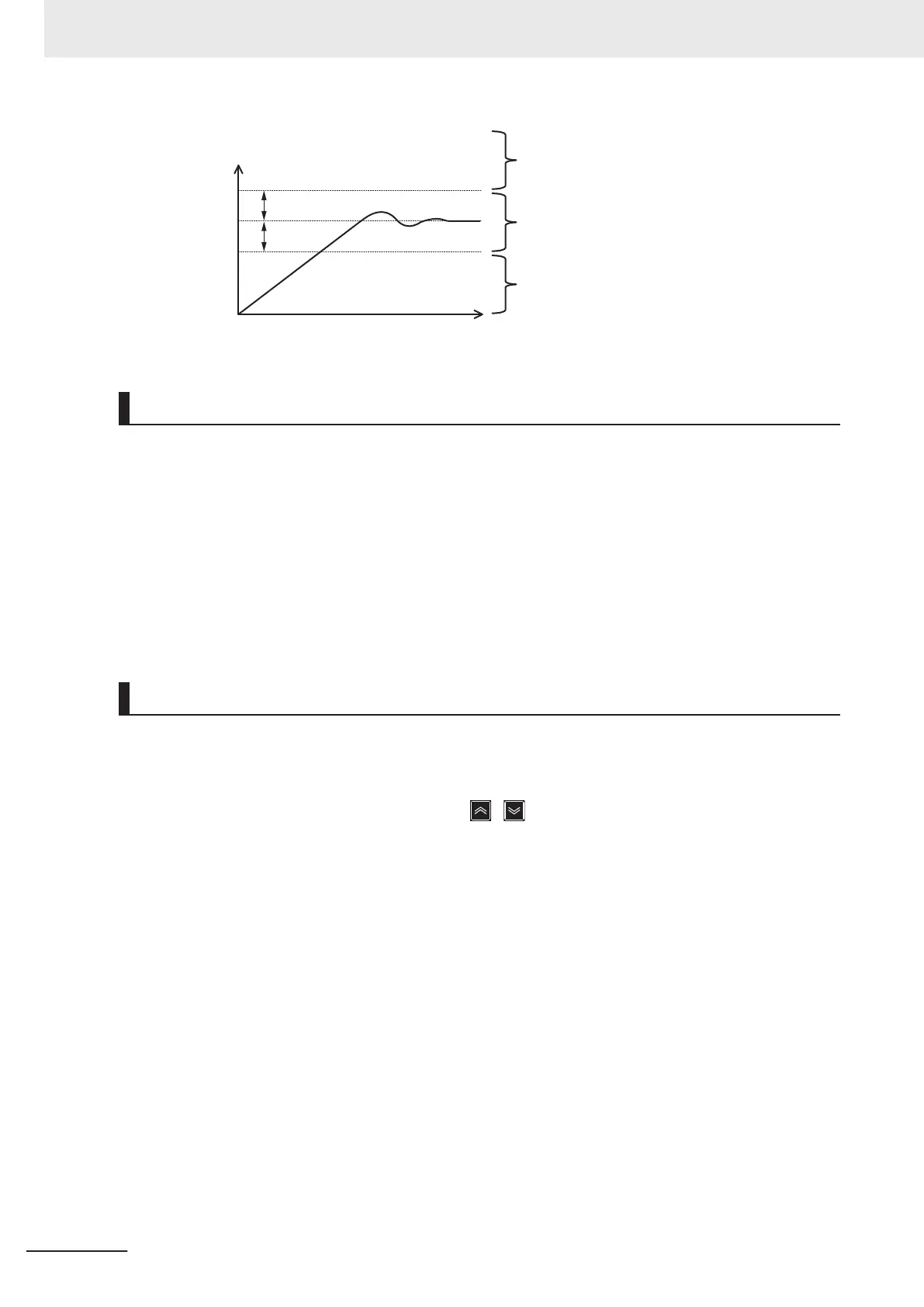
PID feedback
value (PV)
PID process
command (SV)
J10
J10
The integration operation is on hold within this range.
The integration operation is on hold within this range.
Time
The integration operation is performed within this range.
PID Output Limiter
It is possible to set a limiter for the upper limit and lower limit in the PID output exclusively for PID
control. The limiter is disabled when PID cancellation “Hz/PID” is entered and operation is performed
at the normal frequency setting.
• PID Control PID Output Upper Limit (J18)
The upper limit value for the limiter of PID controller output is set in percentage. If the set value is
specified as 999, the settings of 1st Frequency Upper Limit (F15) are followed.
• PID Control PID Output Lower Limit (J19)
The lower limit value for the limiter of PID controller output is set in percentage. If the set value is
specified as 999, the settings of 1st Frequency Lower Limit (F16) are followed.
Setting Dancer Control
• PID Control Operator PID Reference Position for Dancer (J57)
The reference position during dancer control is set in the range of -100% to 100%. If J02 =0 (Opera-
tor) is set, this parameter is enabled as the dancer reference position.
The PID command can also be applied by the
/ keys on Operator. In such a case too, the
value of J57 changes along with this parameter.
• PID control (Dancer control gain switching) (J58 to J61)
When the position of the dancer roll (feedback) enters the PID Control PID Reference Position De-
tection Width for Dancer (J58), the PID constant of the PID controller is switched from J03, J04 and
J05 to J59, J60 and J61. It is possible to increase the gain and thus improve the responsiveness,
and increase the accuracy
.
PID Control PID _x000D_ Reference Position Detection Width for Dancer (J58)
Set in the range of 1% to 100%. If set to 0, switching of the PID constant is not performed.
PID Control P Gain 2 (J59)
PID Control I Integral Time 2 (J60)
PID Control D Differential Time 2 (J61)
Same as PID Control P Proportional Gain (J03), PID Control I Integral Time (J04) and PID Control
D Dif
ferential Time (J05).
•
PID Control Block Selection (J62)
7 Other Functions
7-138
M1 Series Standard Type User's Manual (I669)
 Loading...
Loading...









