105
Command Reference List Section 6-2
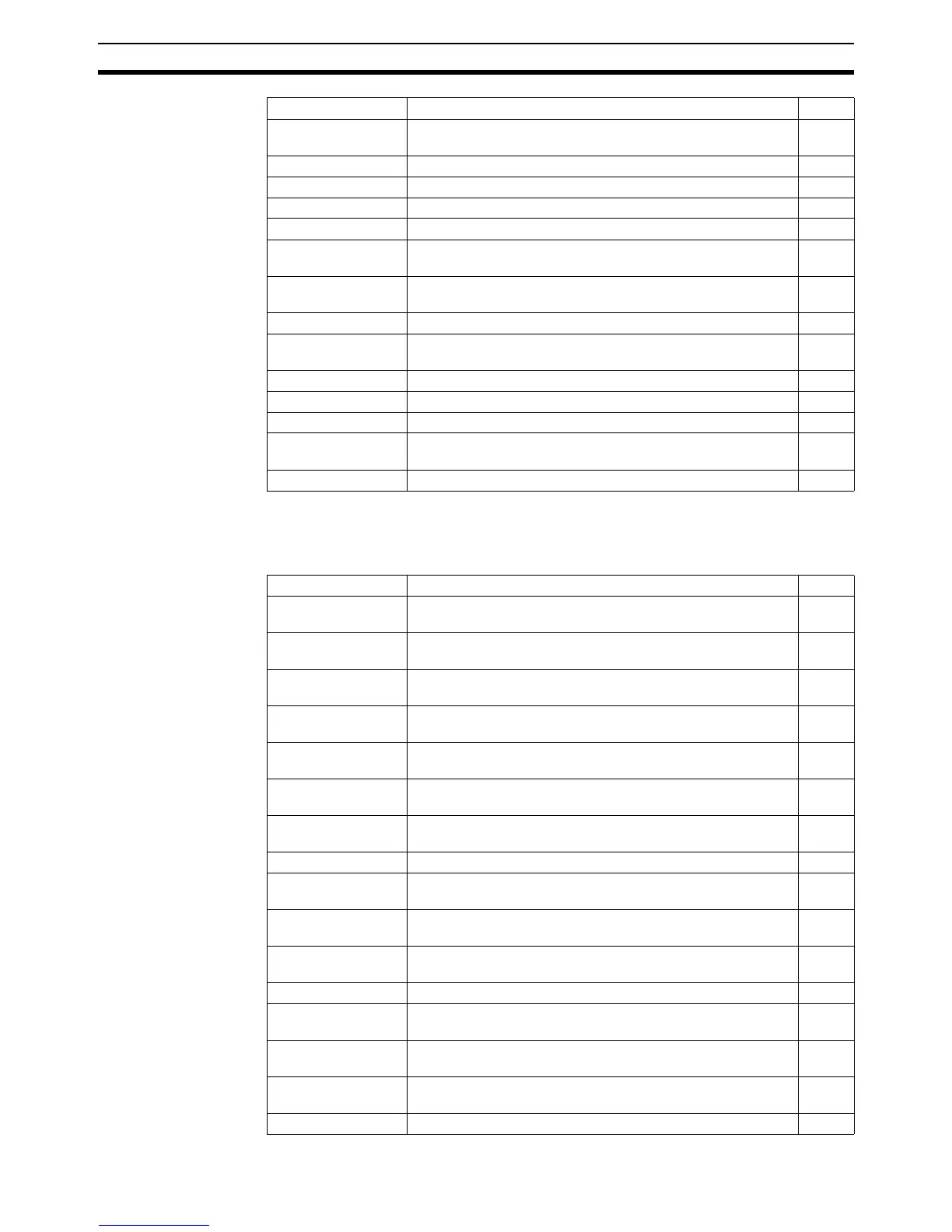
6-2-5 System Commands and Parameters
The table below outlines the system commands and parameters. Refer to the
specified pages for details.
EPROM EPROM stores the BASIC programs in the MC Unit in the
Flash memory.
136
FREE FREE returns the amount of available memory. 141
HALT HALT stops execution of all programs currently running. 144
LIST LIST prints the lines of a program. 154
NEW NEW deletes all the program lines in MC Unit memory. 164
PROCESS PROCESS returns the running status and task number for
each current task.
172
RENAME RENAME changes the name of a program in the MC Unit
directory.
177
RUN RUN executes a program. 180
RUNTYPE RUNTYPE determines if a program is run at start-up, and
which task it is to run on.
181
SELECT SELECT specifies the current program. 184
STEPLINE STEPLINE executes a single line in a program. 186
STOP STOP halts program execution. 187
TROFF TROFF suspends a trace at the current line and resumes nor-
mal program execution.
190
TRON TRON creates a breakpoint in a program. 190
Name Description Page
Name Description Page
Hexadecimal input:
“$”
Command $ assigns a hexadecimal number to a variable. 114
AXIS AXIS sets the axis for a command, axis parameter read, or
assignment to a particular axis.
120
BASICERROR BASICERROR is used to run a specific routine when an error
occurs in a BASIC command.
122
CHECKSUM CHECKSUM contains the checksum for the programs in
RAM.
126
CLEAR CLEAR clears all global variables and the local variables on
the current task.
126
CLEAR_BIT CLEAR_BIT clears the specified bit of the specified VR vari-
able.
126
COMMSERROR COMMSERROR contains all the communications errors that
have occurred since the last time that it was initialised.
127
CONTROL CONTROL contains the type of MC Unit in the system. 128
ERROR_AXIS ERROR_AXIS contains the number of the axis which caused
the motion error.
136
FLASHVR FLASHVR is used to store VR or Table variable data into the
Flash memory.
139
LAST_AXIS LAST_AXIS contains the number of the last axis processed
by the system.
153
LOCK LOCK prevents the programs from being viewed or modified. 155
MOTION_ERROR MOTION_ERROR contains an error flag for axis motion
errors.
156
NIO NIO contains the number of inputs and outputs connected to
the system.
164
READ_BIT READ_BIT returns the value of the specified bit in the speci-
fied VR variable.
174
RESET RESET resets all local variables on a task. 179