8
Motion Control Concepts Section 1-3
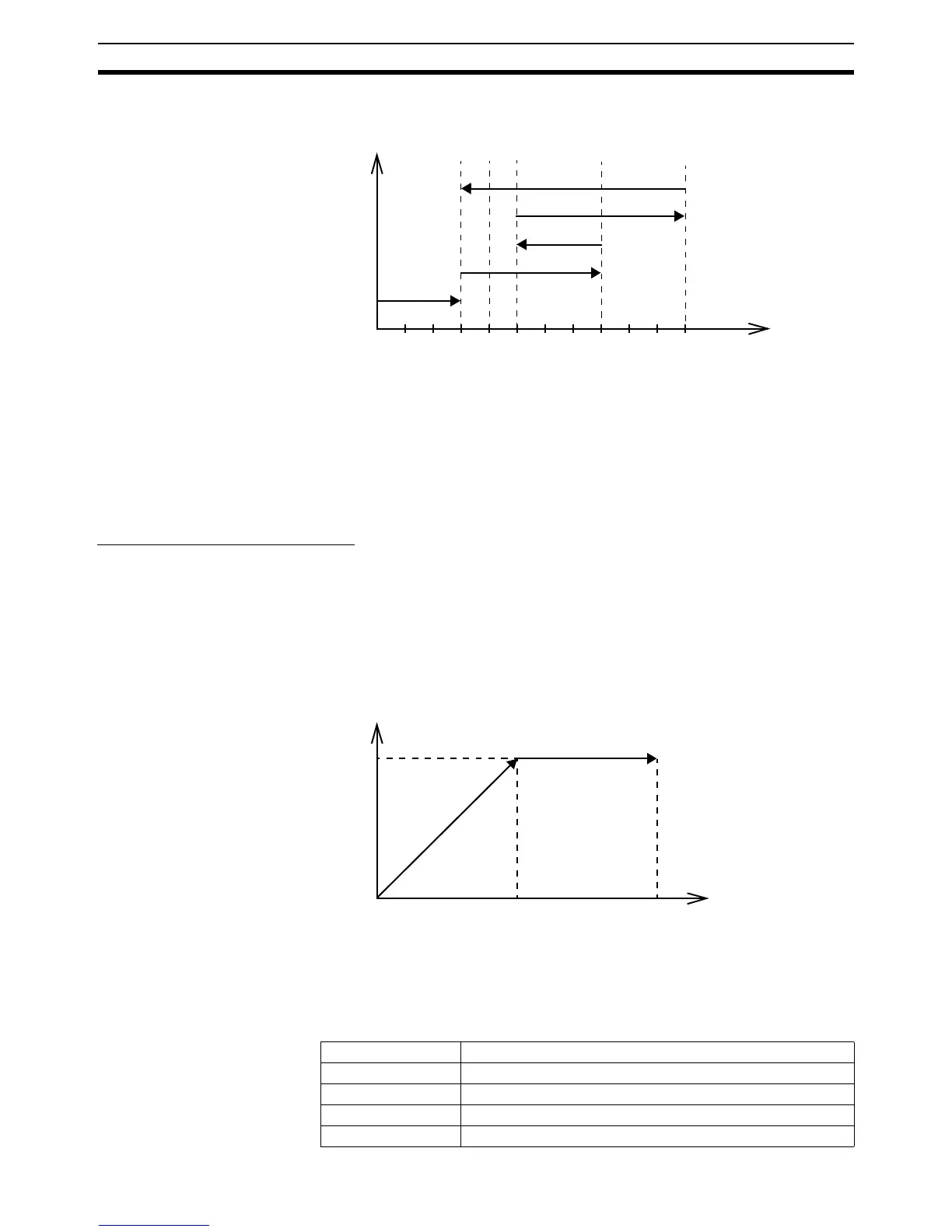
ple of relative (command MOVE) and absolute (command MOVEABS) linear
moves.
1-3-1 PTP-control
In point-to-point positioning, each axis is moved independently of the other
axis. The MC Unit supports the following operations.
• Relative move
• Absolute move
• Continuous move forward
• Continuous move reverse
Relative and Absolute Moves
To move a single axis either the command MOVE for a relative move or the
command MOVEABS for an absolute move is used. Each axis has its own
move characteristics, which are defined by the axis parameters.
Suppose a control program is executed to move from the origin to an axis
no. 0 coordinate of 100 and axis no. 1 coordinate of 50. If the speed parame-
ter is set to be the same for both axes and the acceleration and deceleration
rate are set sufficiently high, the movements for axis 0 and axis 1 will be as
illustrated below.
At start, both the axis 0 and axis 1 will move to a coordinate of 50 over the
same duration of time. At this point, axis 1 will stop and the axis 0 will con-
tinue to move to a coordinate of 100.
Relevant Axis Parameters As mentioned before the move of a certain axis is determined by the axis
parameters. Some relevant parameters are given in the next table.
0
50 100
MOVE(30)
MOVE(50)
MOVEABS(50)
MOVE(60)
MOVEABS(30)
Axis position
0
50
100
50
Axis 0
Axis 1
MOVEABS(100) AXIS(0)
MOVEABS(50) AXIS(1)
Parameter Description
UNITS Unit conversion factor
ACCEL Acceleration rate of an axis in units/s
2
DECEL Deceleration rate of an axis in units/s
2
SPEED Demand speed of an axis in units/s