54
System Functions Section 3-3
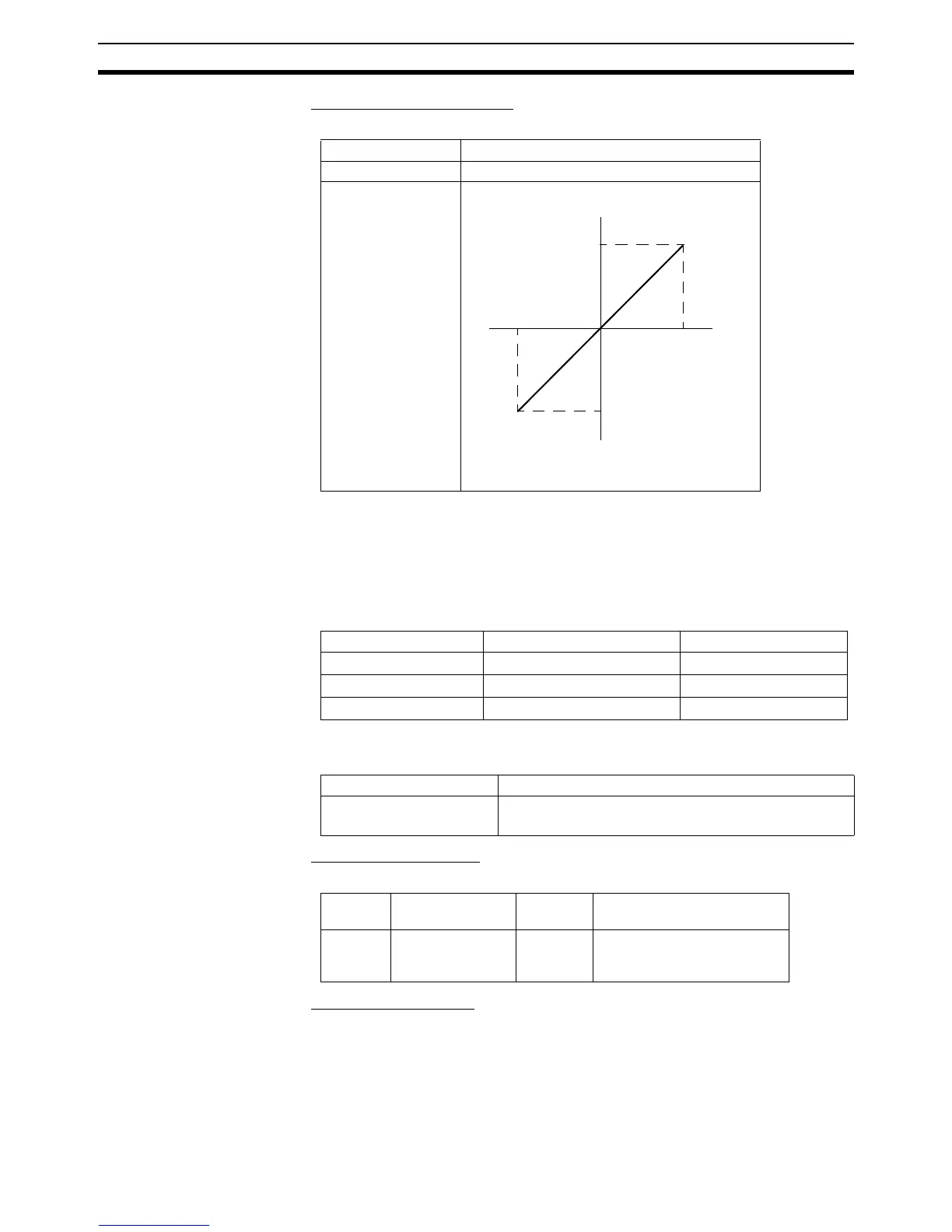
■ AIN3: Torque Monitor Value
Analog input 3 contains the Torque Monitor Value from the Servo Driver.
3-3-4 Absolute Encoder
If the Servo Driver uses a Servomotor with an absolute encoder, the MC Unit
will obtain the absolute encoder position each start-up.
As a result, operation can be performed immediately without any origin search
operation at start-up. Use one of the following Servomotors with absolute
encoder.
A backup battery is required when using an absolute encoder. Install the bat-
tery into the Servo Driver’s battery holder.
■ Setting up the encoder
Set-up the use of the absolute encoder by performing the following setting.
■ Multi-turn limit setting
If an absolute encoder is used, the counter counts the number of rotations
from the setup position and output the number of rotations from the Servo
Driver to the MC Unit. For some applications it is convenient to reset the multi-
turn data back to 0 after a certain amount of turns.
Item Specification
Output Range (-15000, 15000)
Resolution Given by T_RATE axis parameter.
Max. torque
-Max. torque
15000
-15000
Torque Monitor [% of rated torque] = AIN3*T_RATE
Servo Driver Servomotor Model Encoder Resolution
Single-phase 100 V AC
R88M-W
❏❏S-❏
16-bit
Single-phase 200 V AC
R88M-W
❏❏T-❏
16-bit
Three-phase 400 V AC
R88M-W
❏❏C-❏
17-bit
Item Specification
R88A-BAT01W Absolute Encoder Backup Battery Unit
Battery: Toshiba ER3V, 3.6 V, 1000 mA
Param-
eter No.
Parameter Name Required
Setting
Explanation
Pn002.2 Operation switch
when using abso-
lute encoder
0 Use as absolute encoder