44
Overview Section 3-1
3-1 Overview
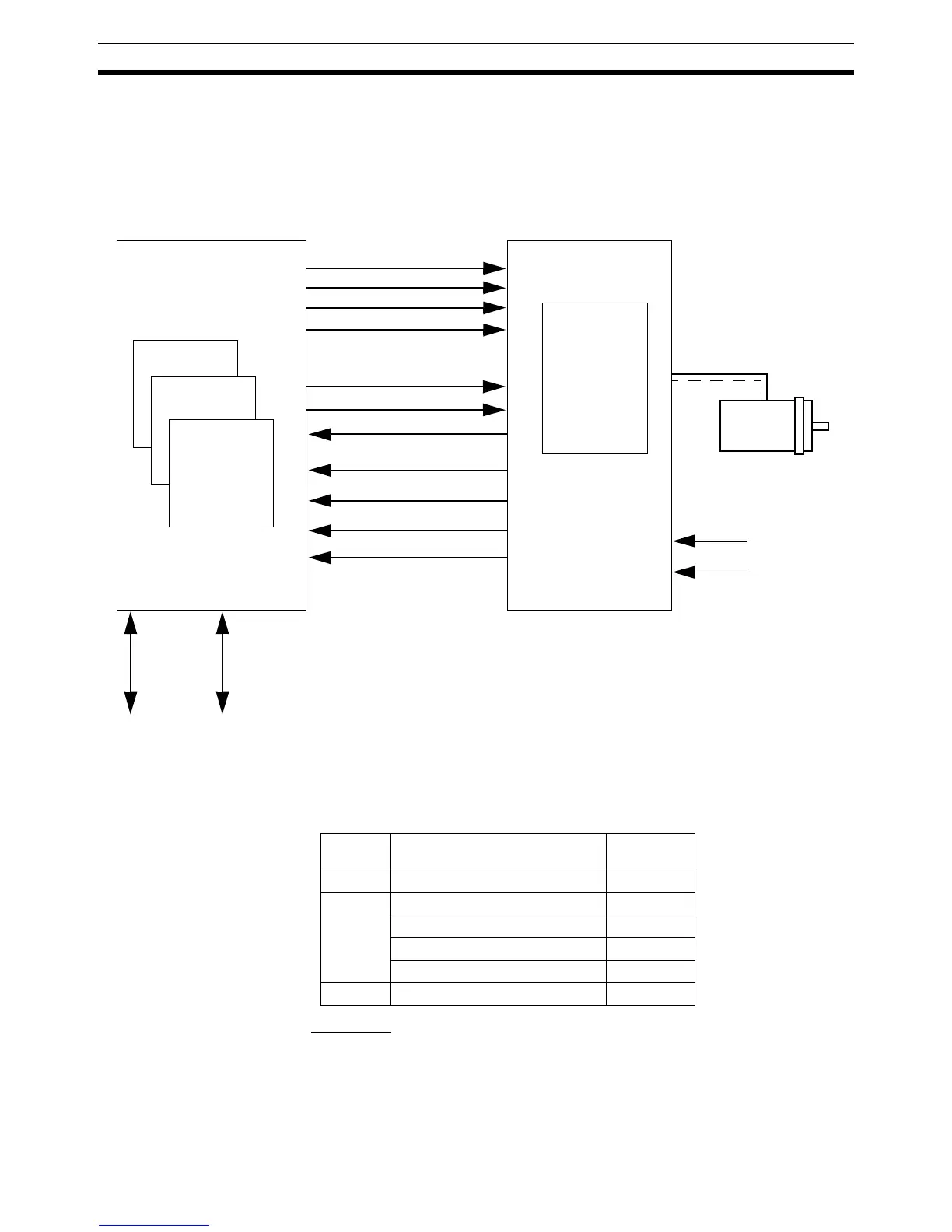
The MC Unit together with the Servo Driver combine into one complete Servo
System which is able to control the application. All Motion Control commands
and data transfers are directly communicated between the MC Unit and the
Servo Driver.
MC Axis Configuration The MC Unit has 3 axes in total, which can be used for different motion con-
trol purposes depending on the application. The following table lists the differ-
ent available axis types. The type of each axis is set by using the ATYPE axis
parameter.
■ Servo Axis
The servo axis for axis 0 controls the movement of the connected servo sys-
tem. The Servomotor can be controlled in both speed control as in torque con-
trol.
Speed control can be achieved in closed loop and in open loop. In closed
loop, the speed reference to the Servo Driver based on the calculated
MING
MCW151
Servo Driver
Servo
Control
RUN (Servo ON)
Speed Reference
Alarm Reset
Torque Reference
TVSEL
Position Data
Print Registration Data
Monitor Data
I/O Status Data
Control Status Data
Digital Inputs
Analog Input
Digital
I/O
Encoder
I/O
Axis 0: Servo
Axis 1: Enc In/ Out
Axis 2: Virtual
Axis
number
Axis type ATYPE
value
0Servo 13
1 Virtual 0
Servo 2
Encoder input (default) 3
Encoder output 14
2 Virtual 0