222
Error Handling Section 8-2
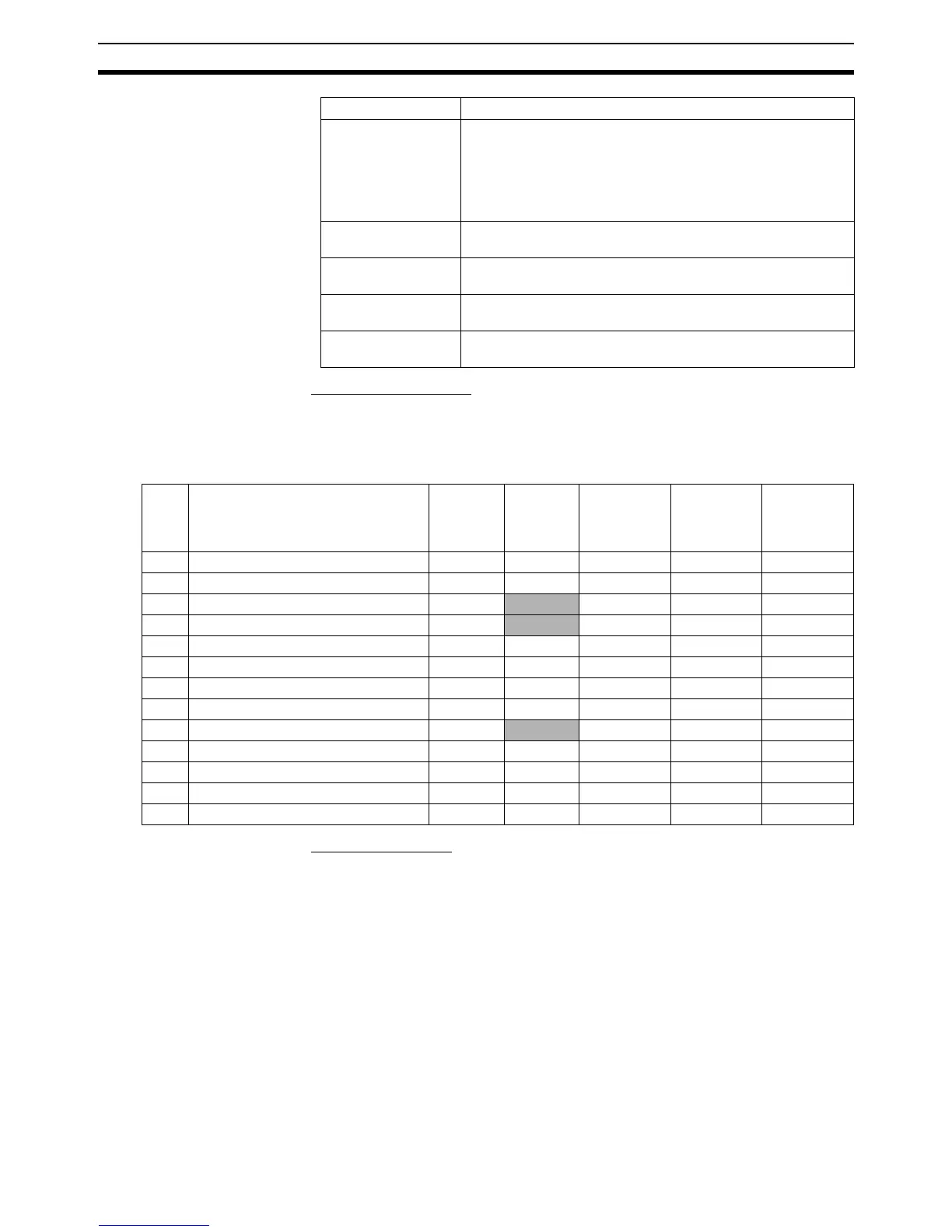
■ Axis Status Definition
The axis status for each axis is defined using the AXISSTATUS axis parame-
ter. The AXISSTATUS axis parameter definition for the three axes is shown in
the following table. The default value of ERRORMASK for all axes is 268.
Note that the ERRORMASK parameter can be set separately for each axis.
■ Servo Driver Alarm
If the Servo Driver detects an error, it will generate an alarm. The MC Unit
provides the following utilities to detect the Servo Driver alarm:
• The Servo Driver Alarm bit (no. 3) of the AXISSTATUS axis parameter for
axis 0 will be set. Also input no. 24 will be set.
• The DRV_STATUS system parameter will contain the Servo Driver alarm
code (in hex). During normal operation DRV_STATUS will have value
99 Hex.
Refer to the Servo Driver manual for appropriate alarm countermeasures.
Cancel the alarm using one of the following methods.
• Perform the DRV_CLEAR command in the MC Unit. Please note that this
is only able to cancel some of the alarm states.
• Turn OFF the power supply (both the Servo Driver and MC Unit), and turn
it ON again.
ERRORMASK The ERRORMASK axis parameter enables to user to deter-
mine which condition will generate a motion error for each
axis.
If the result of a bitwise AND operation of the ERRORMASK
and AXISSTATUS parameter value for one axis is non-zero, a
motion error will occur.
MOTION_ERROR The MOTION_ERROR system parameter will be ON when a
motion error has occurred.
ERROR_AXIS The ERROR_AXIS system parameter contains the axis num-
ber for which the detected motion error has occurred.
DATUM The DATUM(0) will clear the motion error. The AXISSTATUS
status will be cleared.
DRV_RESET DRV_RESET will software reset both the Servo Driver as the
MC Unit.
Parameter Description
Bit Description Value Character
(as used
in Motion
Perfect)
Axis 0
(Servo
Driver)
Axis 1
(Encoder in/
out, virtual)
Axis 2
(Virtual)
0- 1 - - - -
1 Following Error Warning 2 w x - -
2 Servo Driver Communication Error 4
ax - -
3 Servo Driver Alarm 8
mx - -
4Forward Limit 16 f x x x
5 Reverse Limit 32 r x x x
6 Datuming 64 d x x x
7 Feed Hold Input 128 h x x x
8 Following Error Limit 256
ex - -
9 Forward Software Limit 512 x x x x
10 Reverse Software Limit 1024 y x x x
11 Cancelling Move 2048 c x x x
12 Encoder Out Overspeed 4096 o - x -