Function Parameters 9-45
AC10 Inverter
FA20 Integration time I (s)
FA21 Differential time D (s)
FA22 PID sampling period (s)
Increasing proportion gain, decreasing integration time and increasing differential time can
increase the dynamic response of PID closed-loop system. But if P is too high, I is too low or D
is too high, system may be unstable.
PID adjusting period is set by FA22. It affects PID adjusting speed.
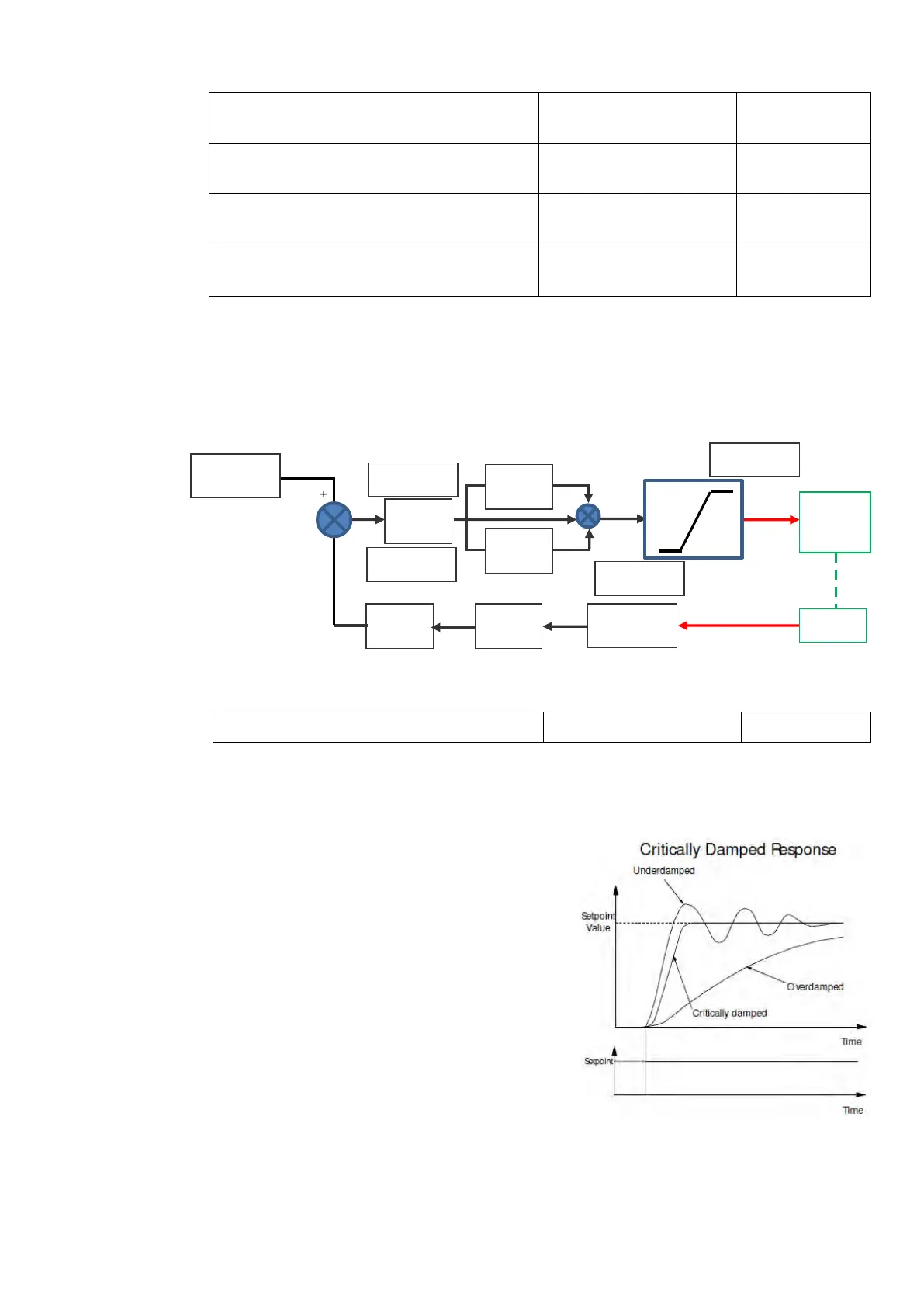
The following is PID block diagram.
FA29, PID dead time has two functions. First, setting dead time can restrain PID adjustor
oscillation. The greater this value is, the lighter PID adjustor oscillation is. But if the value of
FA29 is too high, PID adjusting precision will decrease. For example: when FA29=2.0 and
FA04=70, PID adjusting will not be valid during the feedback value from 68 to 72.
You should try to achieve a critically damped
response which allows the mechanics to track as
precisely as possible a step change on the
setpoint.
• In underdamped systems, the output
oscillates and the settling time increases.
• Critically damped systems have no
overshoot or oscillations. They reach the
setpoint within the desired response time.
• Overdamped systems do not oscillate but
do not reach the setpoint within the desired
response time.
Note: For most applications, derivative gain is not used and is left at its default value of 0.0S
Derivative gain can improve response in some dancer tension controlled systems, particularly those
systems with high inertia dancers which need an instantaneous response to overcome the weight of
the dancer roll. For loadcell controlled tension systems, derivative gain is almost never used.
Object
Gain
Filter
Reference
Feedback

 Loading...
Loading...







