USER MANUAL
Page 70 of 86 URM18PH392 Rev A. May 2020
Lag The interval of time between requesting a VIPER™ system data point and receiving it
into the host computer.
Latency The interval of time between when measurement data were collected and when the
P&O result is ready for transfer to the host computer.
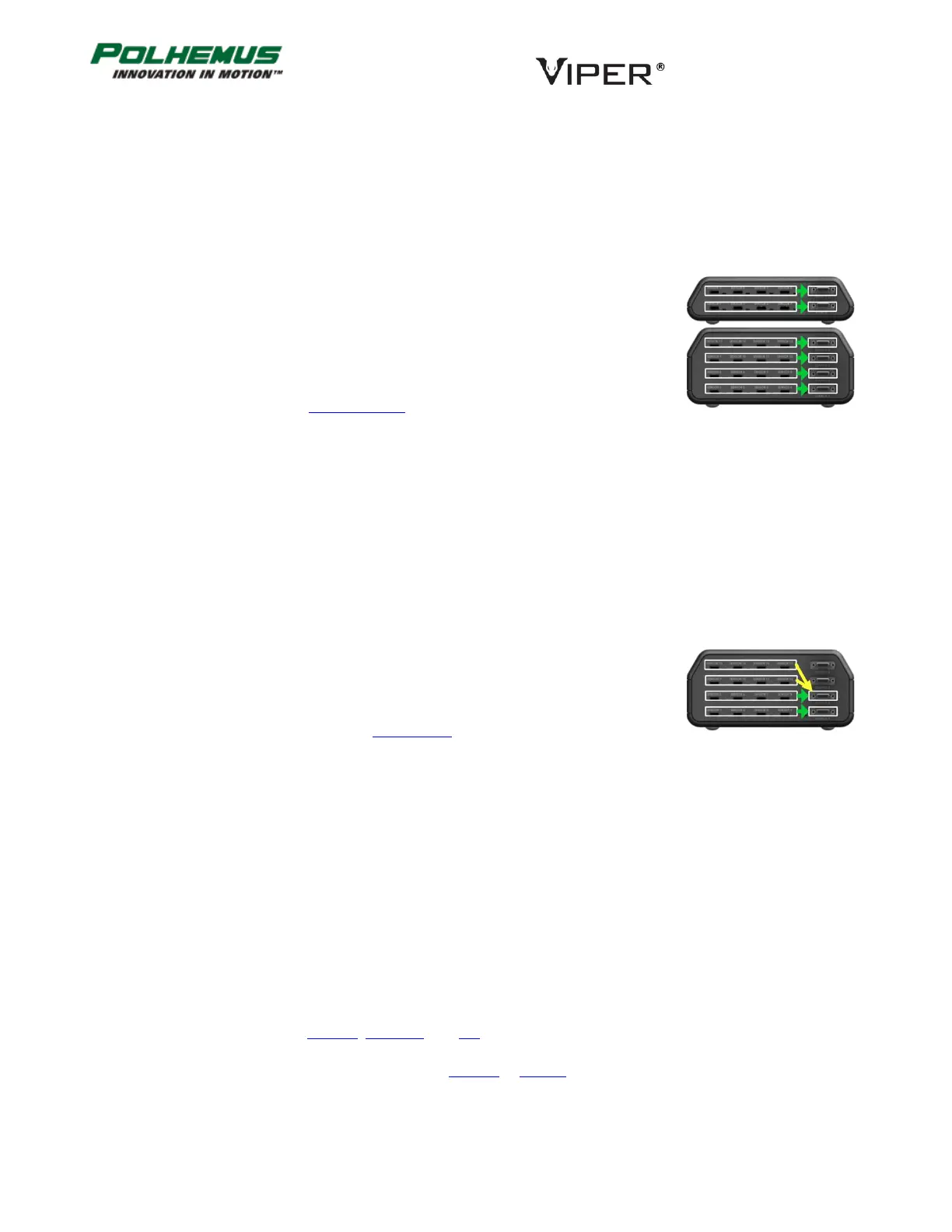
Local Source The Source that is local to a given Sensor is determined by where the Source connector
is plugged into the SEU. The Local Source is the Source that is
detected in the Source Port at the same board level as the
Sensor. The green arrows in the diagram at right show the
location of the local Source Port for each group of 4 sensors.
By default, Sensors report P&O with respect to the Local
Source or the Nearest Source detected on a lower numbered
Source Port if none is detected in the local Source port. See
also Nearest Source definition.
Motion Tracking Area Also called the Motion Box or Tracking Volume. The volume in which motion tracking is
specified to perform as prescribed. Although this 3D volume usually is cubical in nature,
many of the tracking technologies known as ‘active’ are dependent on a source of
stimulation (e.g., magnetic field, light source) which actually performs equally well at a
constant radius from the Source so that the “box” actually might be better described as
spherical or hemispherical.
Nearest Source The Local Source, or if no Local Source is detected, then the first Source detected on a
lower numbered Source Port. The yellow arrows in the diagram at right show the
location of the Nearest Source for the top two groups of 4
sensors. By default, Sensors report P&O with respect to the
Local Source or the Nearest Source detected on a lower
numbered Source Port if none is detected in the local Source
port. See also Local Source definition.
NIST-traceable NIST traceable calibration is an assurance program that certifies that a manufacturer is
fully equipped to calibrate equipment to National Institute of Standards and Technology
(NIST) standards and that any products offered by that manufacturer will match those
NIST-maintained measurement standards. With NIST traceable calibration, Polhemus’
calibration fixturing has an unbroken chain of measurements that leads back to NIST
maintained standards.
Orientation The imaginary rotation that is needed to move an object from a reference placement to
its current placement. Orientation is given relative to a frame of reference specified by a
Cartesian coordinate system. Also known as Attitude.
Orientation Angles The azimuth, elevation, and roll angles that define the current orientation of the Sensor
coordinate frame with respect to the designated tracking system reference frame. Euler
angles may be specified in degrees or radians.