DESCRIPTION OF PROGRAMMING PARAMETERS
Parameter /
Default Value
7 I SLIP=2.0%(*)
I SLIP COMPENSAT
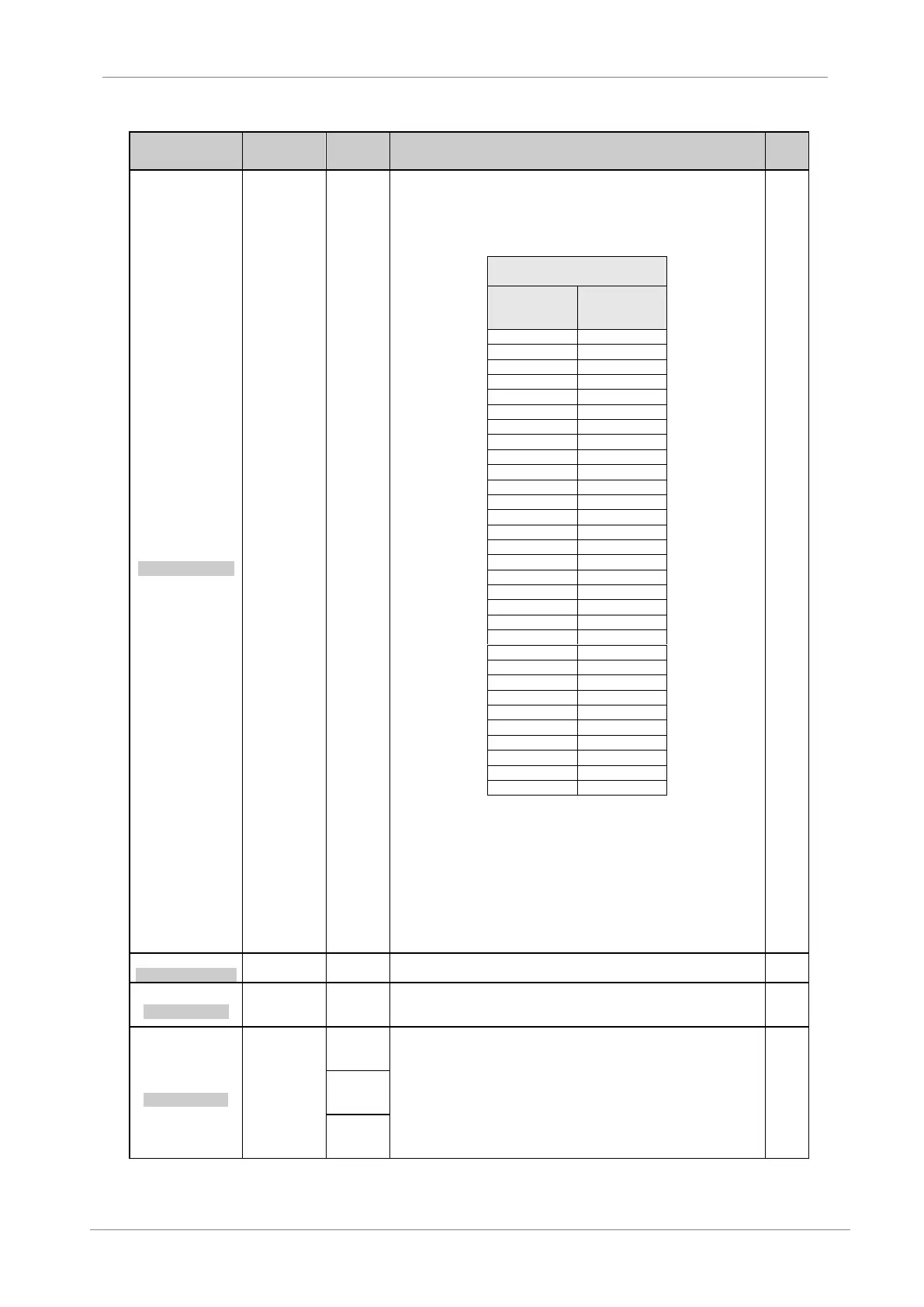
G19.2.7 / Current
limit factor
Modifies the speed by reducing the output frequency to keep the output current
within a controllable margins (display shows ILT). Adjusting this parameter can
improve the stability of the current limit function taking the motor slip into account.
Note: The following table shows the default values for drives of any nominal
voltage.
Default Values for All
Powers
* Adjust mode: When initializing factory settings (1) or manually modifying the
Motor Nominal Power (G2.3) (2). The value of the current limit factor is initialized
according to the table. Values outside the table are estimated according to the
table.
In all cases the adjustment range is + / -30% of initialized value in any of the two
scenarios given (1) and (2).
Note: We recommend this value is adjusted only when the current limit action is
unstable. A low value will improve the stability although the current limit action will
operate earlier.
9 STR FRQ = 0.0%
START FREQUENCY
G19.2.9 / Initial
frequency
Allows setting of an initial frequency that will be applied from the drive at the
moment of starting.
11 DAMPref=3%
REFER.DAMPING
G19.2.11 /
Damping
reference
In some motors, instable behaviours are generated at some frequencies when the
motors are connected with no load. Set this parameter will control the instability.
13 CT Vbus=800
REGEN BUS VOL
G19.2.13 /
Regeneration
bus voltage
For Vin =
230v,
390 to 410
During the deceleration with loads with inertia, the drive decelerates keeping the
level of the bus voltage set by this parameter, when load and inertia conditions
allow it.
If when decelerating, the fault ‘F2 V LIM FLT’, decrease the value of this
parameter.
For VIN =
400V / 500V
625 to 800V
For VIN =
690V
950 to 1251V