60©2006 Sunrise Medical
QUICKIE ELECTRONICS SECTION
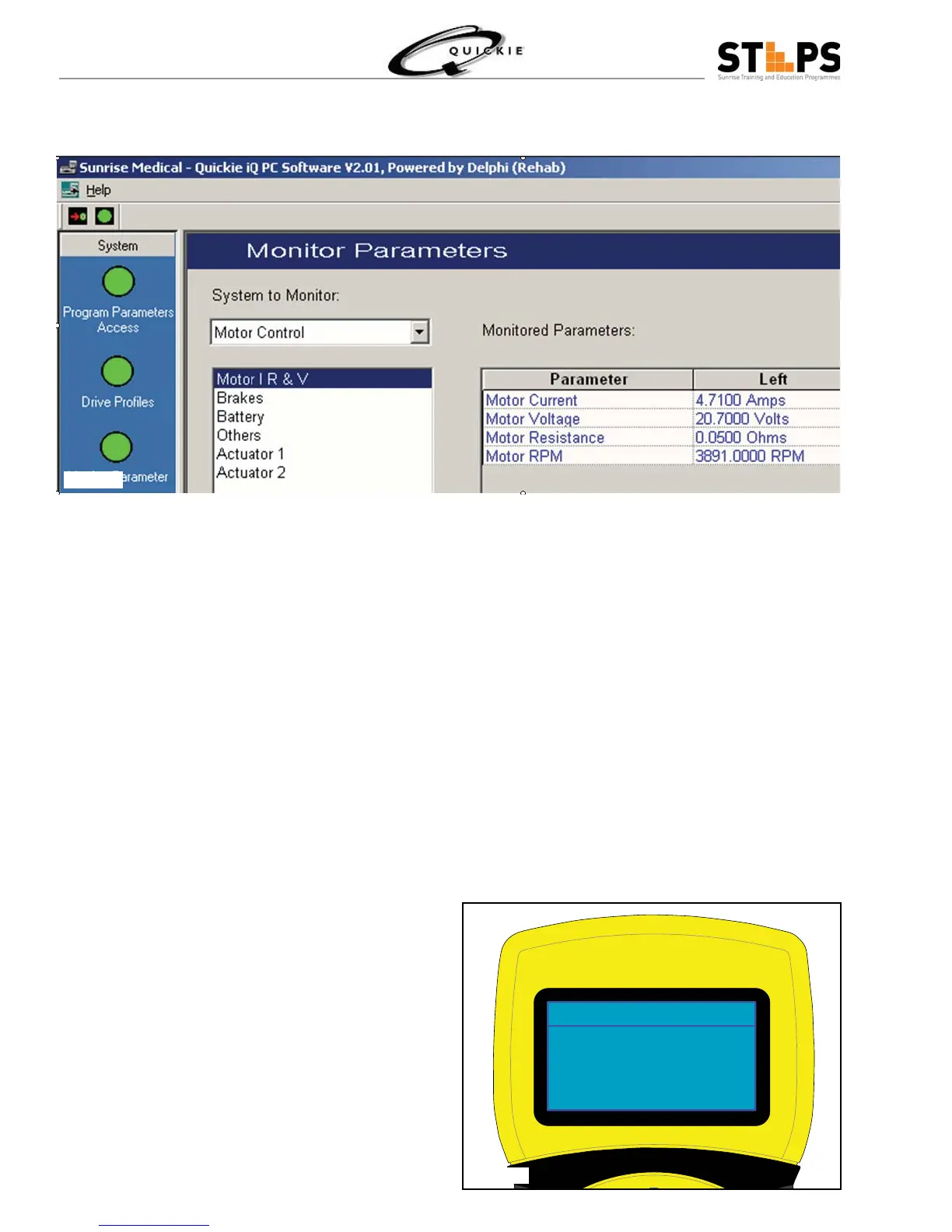
and V. (fi g2.23.12)
If using the Quickie iQ, select Monitor Parameter, followed by selecting Motor Controller, then Motor I R and 6.
V. (fi g 2.23.13)
Operate the wheelchair by moving the joystick (or other control device) to full speed forward. Verify that the 7.
command is forward and even both left and right.
Monitor the Motor Current, Motor Voltage and Motor RPM for both the left and right motors. Refer to the fol-8.
Brakes
+ + -
L R
Current
Voltage
0.54 A
11 V
55 A
11 V
lowing notes:
If using the HHP, select Monitor then Motor Con-9.
troller. Under Motor Controller select Brakes.
The Motor Resistance is the factory default motor compensation. Typical programmed value is .05 Ohms. •
The Motor Voltage for each motor should increase evenly. •
If the voltage is not even, verify that a Veer Compensation has not been programmed into the chair. •
If the Motor Voltages are still not even, the Motor Controller may be defective. Verify that there are no faults •
recorded in the Fault section of the Quickie iQ or HHP.
The Motor Current should be even for both motors when the Motor Voltages are equal. A typical value for •
the Rhythm or Groove motors with the gear box disengaged is 4 to 6 amps. Cold motors may indicate higher
current.
Excessive current may be caused by bad bearings, defective or shorted motor windings, or a dragging park •
brake.
The Motor RPM should be even for both motors when the Motor Voltages are equal. •
If the Motor RPMs are not equal and the wheelchair contains IntelliDrive, suspect a bad motor encoder or •
motor controller.
Fig 2.23.13
Fig 2.23.14