The Speed ID indic
ates which speed range the current speed at the Motion in input corre‐
sponds to. Further information on this can be found in the Flexi Soft Designer operating
instructions.
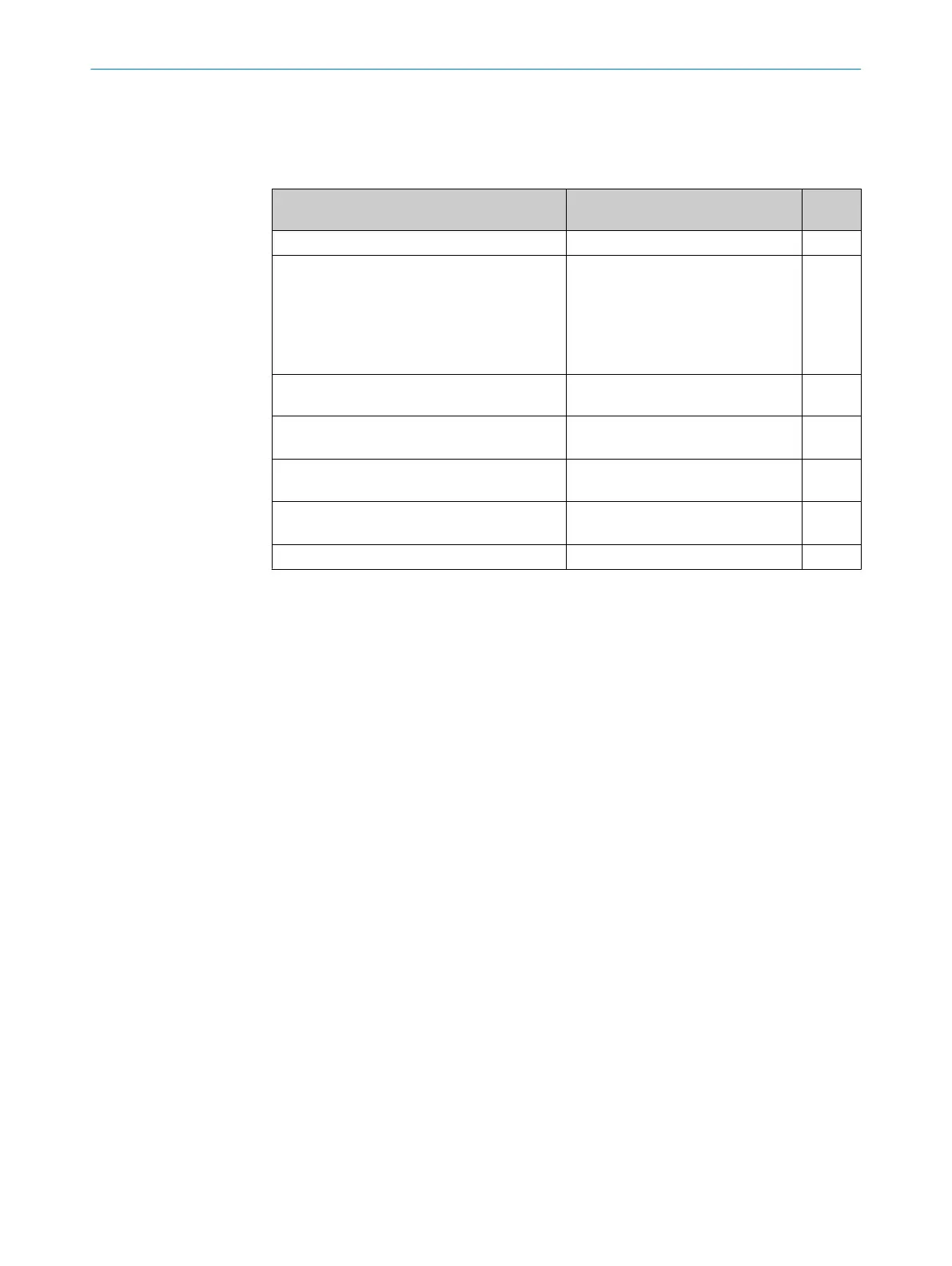
Table 33: Speed at Motion in input
Speed at Motion in input Meaning Speed
ID
The speed is invalid or unreliable. Invalid 0
One of the standstill conditions is met:
•
T
he speed remains lower than the standstill
speed for at least as long as the accepted
standstill speed.
•
The standstill position tolerance has been
determined and not exceeded.
Standstill 1
No standstill and speed > standstill speed ≤
s
peed limit 2
Speed range 2 2
Speed > speed limit 2
Speed ≤ speed limit 3
Speed range 3 3
Speed > speed limit n-1
Speed ≤ s
peed limit n
Speed range n n
Speed > speed limit 8
Speed ≤ s
peed limit 9
Speed range 9 9
Speed > speed limit 9 Speed range 10 10
Special feature of speed ID 2
The lowest speed that can be monitored depends on which sensor variant is used. The
two sensor variants have a different speed acquisition resolution. The minimum speed
that is to be monitored within the application should be at least three times higher than
the speed acquisition resolution.
If this requirement is ignored, the result will be an availability issue rather than a safety
problem.
OLM linear measurement sensor (order no.: 1087575)
•
Speed acquisition resolution = 25 mm/s
•
Lowest speed that can be acquired = 25 mm/s
•
Lowest speed that can be monitored = 75 mm/s
OLM linear measurement sensor (order no.: 1090629)
•
Speed acquisition resolution = 3 mm/s
•
Lowest speed that can be acquired = 3 mm/s
•
Lowest speed that can be monitored = 9 mm/s
7.3.3.3 Speed filter
This function is used to enable the system to tolerate short-term increases or reduc‐
t
ions in speed. The Speed Filter parameter defines the extent to which any breach of the
relevant speed limit will be tolerated (filtered). The maximum length of the route that
the drive may continue to travel in spite of the fact that the applicable speed limit has
been exceeded is 10 mm (this is a default setting).
CONFIGURATION 7
8020941/12O9/2019-08-05 | SICK O P E R A T I N G I N S T R U C T I O N S | Safe Linear Positioning
39
Subject to change without notice