4.7 Induction motor operation with induction motor
4-147
Siemens AG 2005 All Rights Reserved
SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition
End
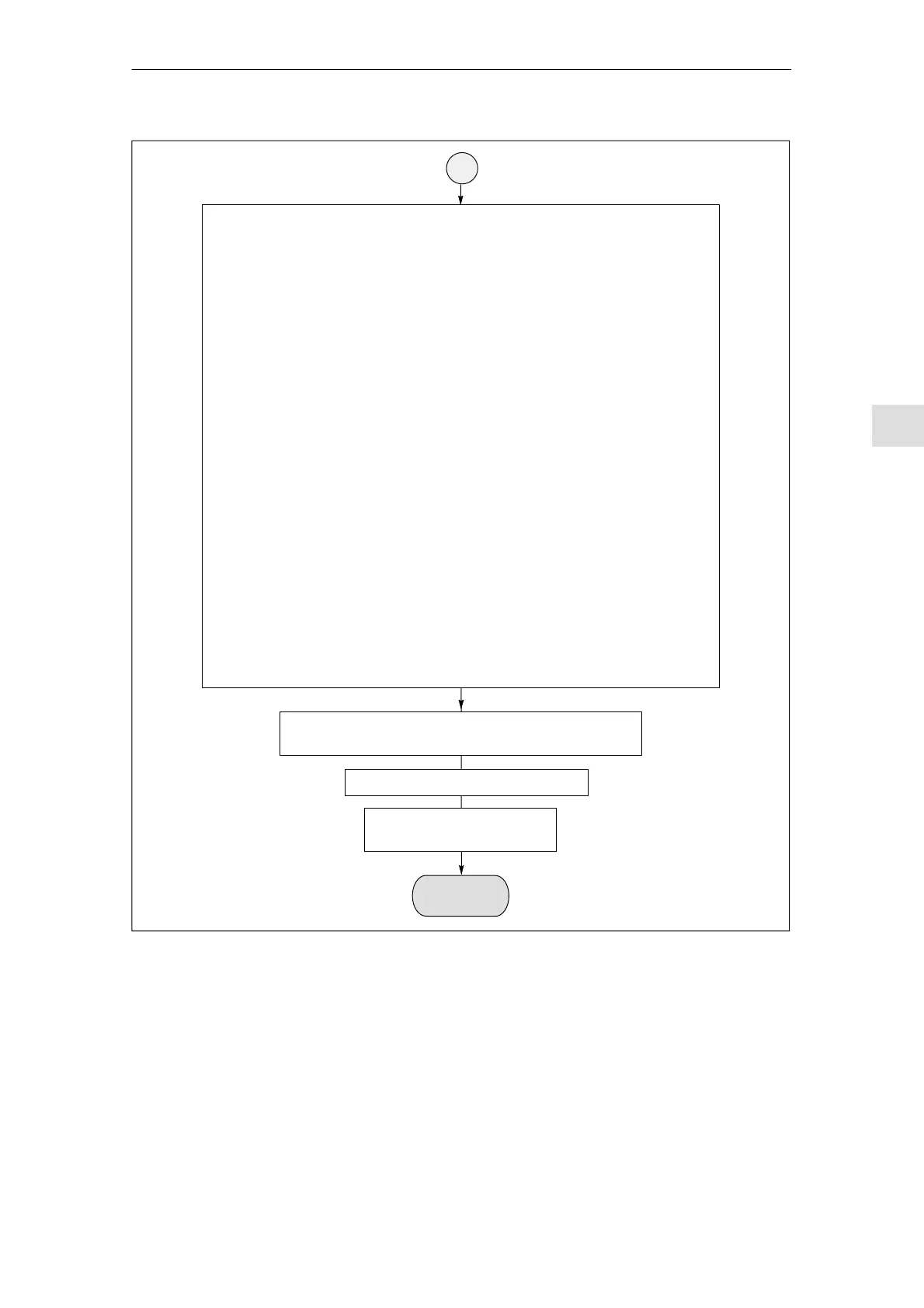
from the previous page
3
Check the following parameters, and if required, change:
P1401:8 Speed for the max. useful motor speed
P0610/0615 Drift/offset correction, terminal 56.x/14.x/terminal 24.x/20.x
P0618 Normalization voltage
P1451:8/1453:8 P gain, speed controller IM/integral action time
P1256:8/1257:8 Ramp–function generator, ramp–up/ramp–down time
P1147 Speed limiting
P1123:8 Load moment of inertia (from SW 2.4)
P1417:8 nx for ”nact < nx” signal
P1418:8 nmin for ”nact < nmin” signal
P1426:8 Tolerance bandwidth for ”nset = nact” signal
P1427 Delay time ”nset = nact” signal
P1428 Threshold torque Mdx
P1429 Delay time ”Md < Mdx” signal
P1230:8 1st torque limit
P1235:8 1st power limit
P1458 Current setpoint, open–loop controlled range IM
P1459 Torque smoothing time constant IM
P1465 Changeover speed IM
P1466 Changeover speed, open–loop/closed–loop control IM
P0660 – 0663 Function, input terminal I0.x/I1.x/I2.x/I3.x
P0680 – 0683 Signaling function, output terminal O0.x/O1.x/O2.x/O3.x
Write into the FEPROM (P0652 = 1)
and wait until writing has been completed (P0652 = 0)
Enable write protection (P0651 = 0)
Save parameters in the file
and document
Fig. 4-9 Commissioning induction motors without encoder (Part 3)
04.99