6
6.3 Axis couplings (from SW 3.3)
6-467
Siemens AG 2005 All Rights Reserved
SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition
6.3.4 Equalization controller (from SW 7.1)
For mechanically coupled axes, e.g. a rotating track which is driven
through two axes, then it is not sufficient to just enter identical speed
setpoints at both axes. Due to the drift, which is
always present in a real system, different torques occur at the coupling
element.
A torque equalization controller is implemented in the ”SIMODRIVE 611
universal” software for applications such as these.
The mechanically coupled axes are in the master/slave mode. The actual
equalization controller is computed in the slave axis. The slave and master
axes are set using parameters.
If a pre–tensioning torque is required (gearbox, play), a parameterizable
supplementary torque is entered at the torque comparison location, which,
when the equalization controller is activated, gradually increases along a
smoothing characteristic which can be parameterized.
If different motors are used or if these are installed so that they oppose
each other, then torque weighting can be parameterized.
P1490 = 1: Analog terminal 24/20 is the source for the master – slave torque setpoint comparison
––> (Master: P0626, P0625, P0631; slave: P0612, P0619)
P1490 = 2: The adjacent drive (double–axis module, drive A or B) is the source for the comparison,
torque setpoint master–slave
P1491
P1492
n
act
Torque weighting,
equalization controller –
slave P1496
i controller
I controller
n controller
n controller
n
set
+
–
–
–
–
Master axis
Slave axis
Equalization controller
n
corr
M
set
M
set
I
qset
i
qset
i
qact
I
qact
n
act
k
Þ = k
T
k
Þ = k
T
Þ : magn. flux
k
T
= k
Þ = torque constant
Time constant,
pre–tensioning torque P1494
M
v
P1493
Torque weighting, equalization
controller – master P1495
–
torque setpoint
torque setpoint
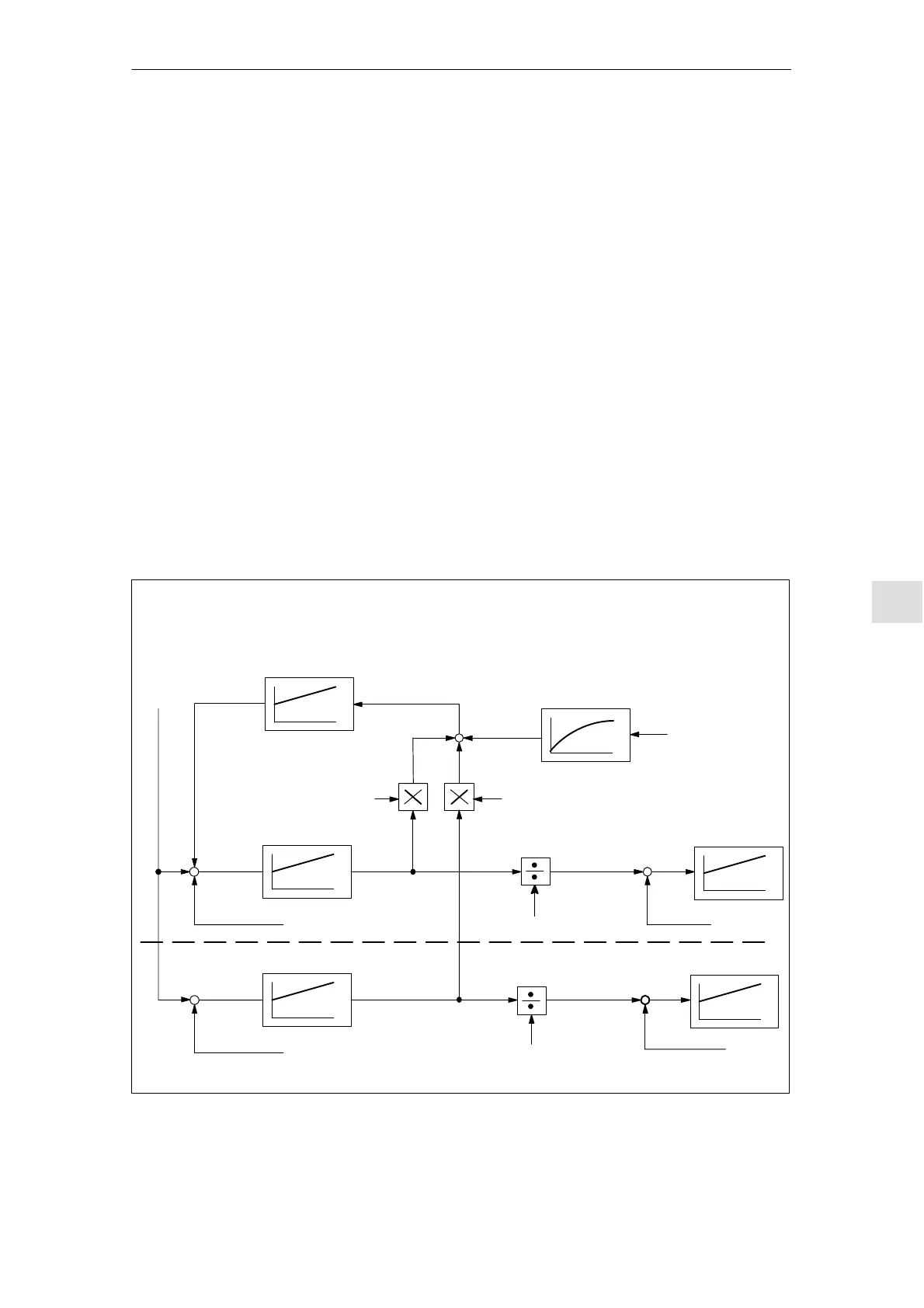
Fig. 6-46 Closed–loop control structure, equalization controller
Description
Closed–loop
control structure
6 Description of the Functions
06.04