6
6.8 Angular incremental encoder interface (X461, X462)
6-563
Siemens AG 2005 All Rights Reserved
SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition
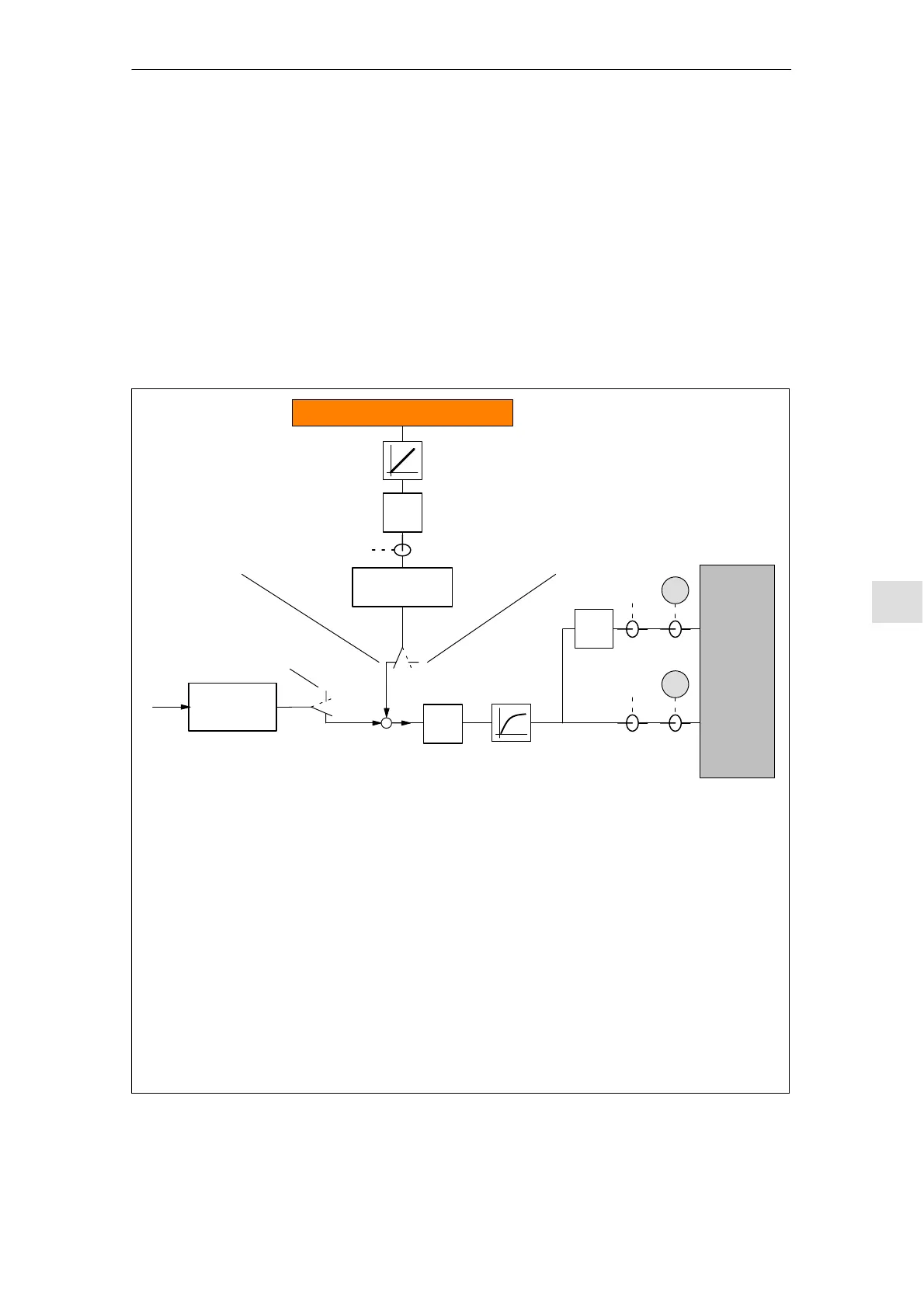
6.8.2 Angular incremental encoder interface as input (P0890 = 2, from
SW 3.3)
The angular incremental encoder interface (X461, X462) is set as input
with P0890 = 2, i.e. an incremental position reference value can be ent-
ered from an external control via terminals A+.x/A–.x, B+.x/B–.x and
R+.x/R–.x.
The incremental position reference values, entered via the angular in-
cremental encoder interface, are entered after the fine interpolator.
P0897
P0210:8
P0895
P0896
P0032
P0401
P0402
Parameter (refer to Chapter A.1):
– P0020 Position reference value
– P0023 Velocity setpoint
– P0032 External position reference value
– P0210:8 Time constant, position reference value filter
– P0401 Coupling factor, revolutions master drive
– P0402 Coupling factor, revolutions slave drive
– P0890 Activates the angular incr. enc./encoder interface
– P0895 Number of input pulse periods
– P0896 Number of dimension system grids
– P0897 Inversion, external position reference value
Analog signals (refer to Chapter 7.4.3):
– 74 Position reference value
– 75 Velocity setpoint
P0232
P0020
75
x
set
x
IPO
Positioning
Position reference value, external
1)
Fine
interpolator
Coupling
factor
1
Ang. incr. enc. interf. as input
74
Closed–
loop
position
control
1
P0890 = 2
”Positioning” mode
and
coupling operation
switched–in
or
Operating mode
”external position
reference value”
1)
”Positioning” mode
and
coupled operation
switched–out
P0023
d/dt
+
1) From SW 3.3, from SW 4.1, no longer possible.
Fig. 6-69 Incremental position reference value via angular incremental encoder interface
Description
Incremental
position reference
value via angular
incremental
encoder interface
6 Description of the Functions
02.03