4.8 Permanent–magnet synchronous motor with field–weakening (PE spindle)
4-160
Siemens AG 2005 All Rights Reserved
SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition
4.8.3 Current controller adaptation
The current controller adaptation must be pre–set as follows before
subsequently setting and checking:
P1182
= 30 %
P1120
= calculated
value [V/A]
P1180 = 0 % P1181 = 30 %
I
q
I
d
Proportional gain K
p
I
max
Fig. 4-10 Pre–setting of the current controller adaptation for 1FE1 motors
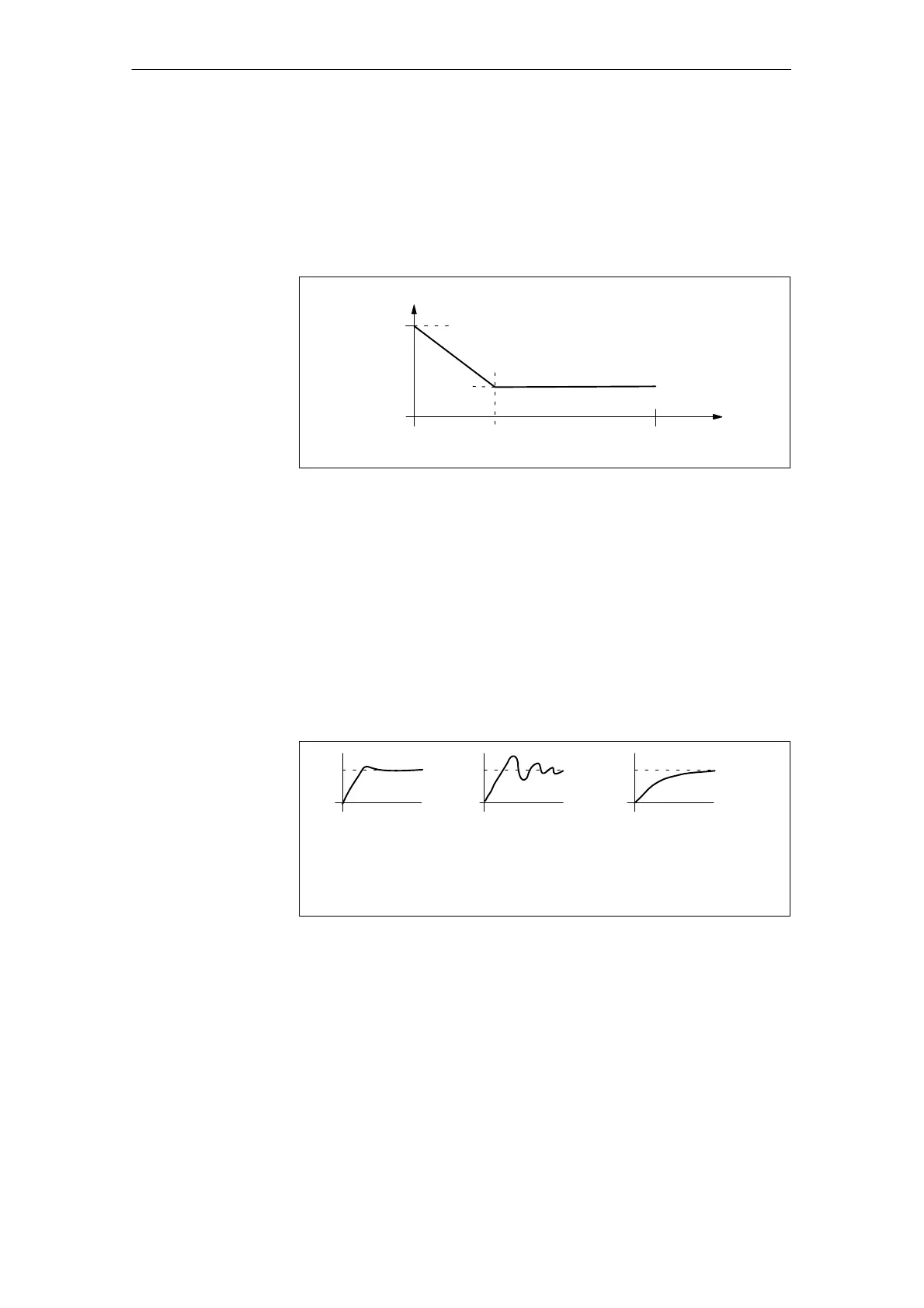
To check and set the current controller adaptation, different current set-
point steps are entered via the SimoCom U parameterizing and start–
up tool using the measuring function. The appropriate step response is
then evaluated (current actual value = torque actual value).
The adaptation characteristic for the P gain K
p
of the current controller
should be set over the complete current I
q
, so that the controller is opti-
mally set at each current, and does not overshoot.
K
p
is optimum
––> OK
K
p
is too high,
overshoots
––> not OK
K
p
is too low,
dampened
transient response
––> OK, not optimum
Fig. 4-11 How should the step response be evaluated?
Pre–setting of the
current controller
adaptation
Setting the current
controller
adaptation
Goal when
setting the
P gain K
p