6
6.8 Angular incremental encoder interface (X461, X462)
6-564
Siemens AG 2005 All Rights Reserved
SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition
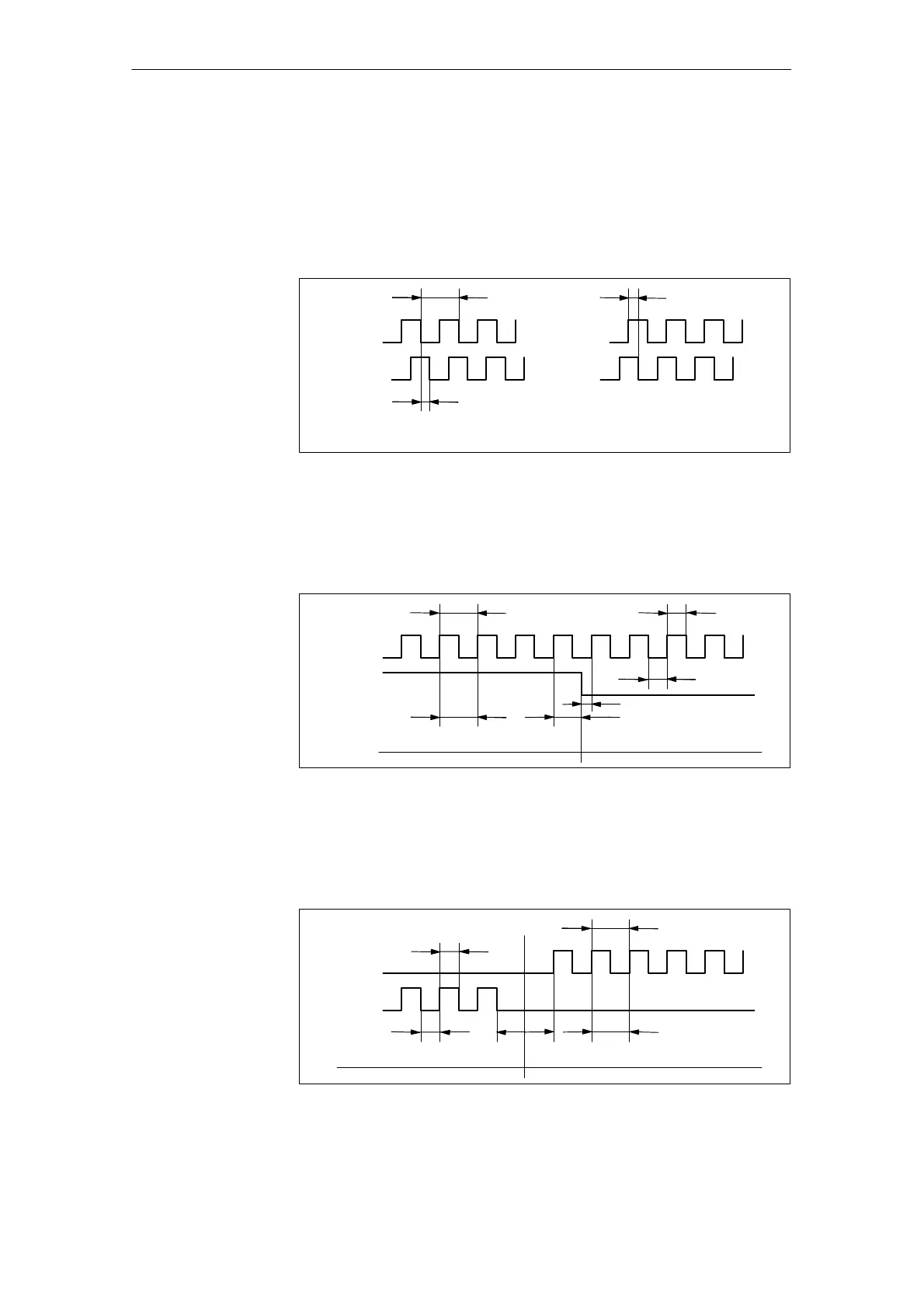
The following input waveforms can be selected:
Quadrature signal (P0894 = 0)
The position reference value is entered via track A and track B, offset
through 90 degrees. The direction of rotation identification is realized
via the signal sequence.
1 signal period
1 segment
Track A
Track A*
Track B
Track B*
Track A before B
––> positive setpoint input
Track B before A
––> negative setpoint input
t
a
Edge clearance
Fig. 6-70 Position reference value input via quadrature signals (P0894 = 0)
Pulse/direction signal (P0894 = 1)
The position reference value is entered via track A and the direction
identification via track B.
1 signal period
1 segment
Track A
Track A*
Track B
Track B*
Positive setpoint input
Negative setpoint input
t
high
t
low
t
s
t
a
Fig. 6-71 Position reference value input via pulse/direction signal (P0894 = 1)
Forwards/backwards signal (P0894 = 2)
The position reference value is entered, depending on the selected di-
rection, via track A or B with the corresponding other track.
1 signal period
1 segment
Track A
Track A*
Track B
Track B*
Positive setpoint input
Negative setpoint input
t
low
t
high
t
a
Fig. 6-72 Position reference value entered via the forwards/backwards signal
(P0894 = 2)
Input signal
waveform
(P0894)
6 Description of the Functions
08.02