4.7 Induction motor operation with induction motor
4-152
Siemens AG 2005 All Rights Reserved
SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition
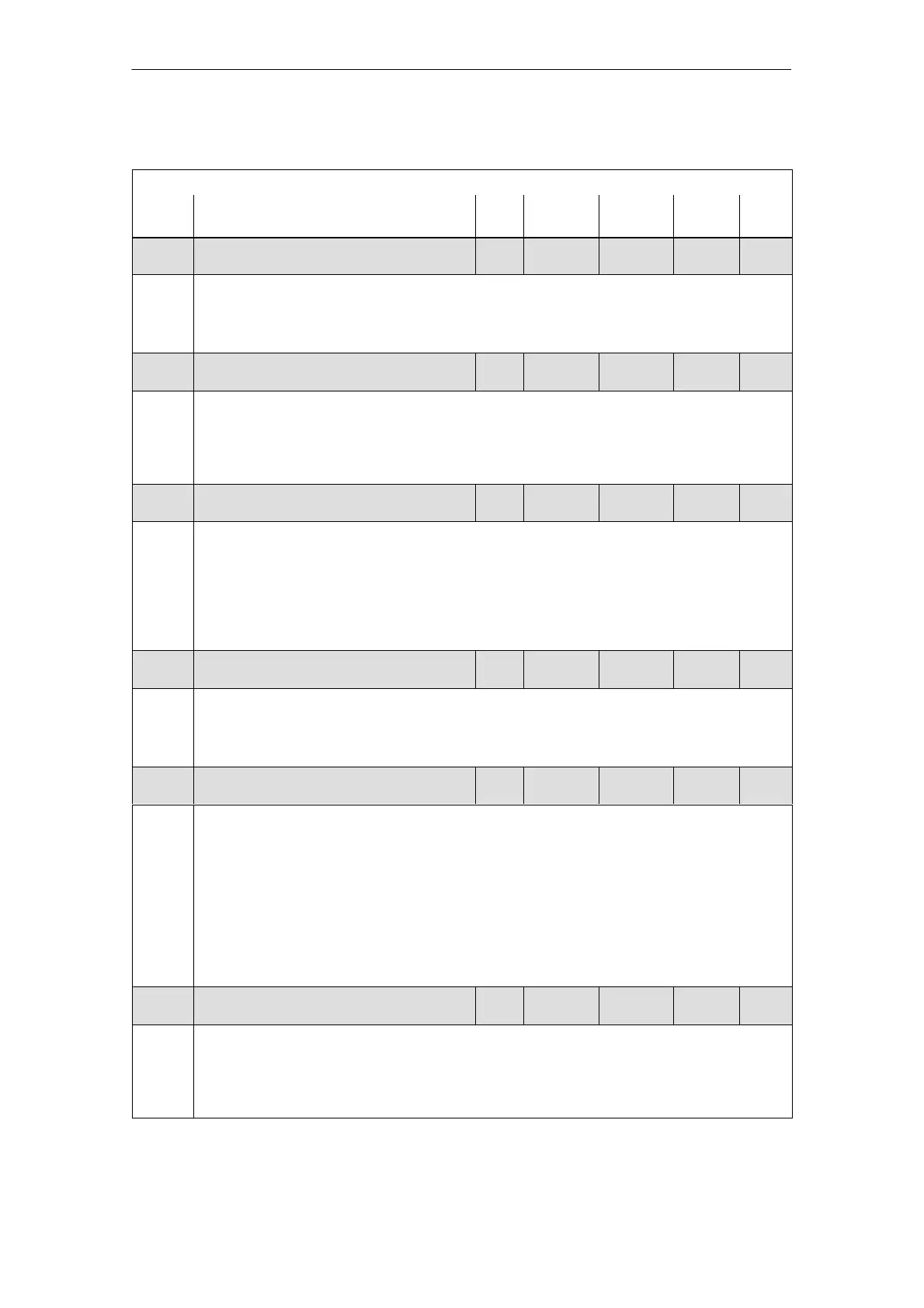
Table 4-7 Parameter overview for IM operation (encoderless operation)
Parameters
No. Name Min. Standard Max. Units Effec-
tive
1451:8 P gain, speed controller IM (ARM) 0.0 0.3 9 999.999 Nms/rad Imme-
diately
... the P gain of the speed controller in IM operation is set (operation without encoder).
Note:
The parameter is preset when executing the ”calculate controller data”/”calculate unlisted
motor” function.
1453:8 Integral action time, speed controller IM
(ARM)
0.0 140.0 6 000.0 ms Imme-
diately
... the integral action time of the speed controller is set in IM operation (operation without en-
coder).
Note:
The parameter is preset when executing the ”calculate controller data”/”calculate unlisted
motor” function.
1458 Current setpoint open–loop controlled
range IM (ARM)
0.0 90.0 150.0 % Imme-
diately
For pure IM operation (P1465 = 0), the drive is open–loop, current–frequency controlled below
the changeover speed (P1466).
In order to be able to accept a higher load torque, the motor current in this range can be in-
creased using P1458.
Note:
This is entered as a percentage of the rated motor current (P1103).
The current is limited to 90% of the current limit value (P1238).
1459 Torque smoothing time constant AM (ARM) 0.0 4.0 100.0 ms Imme-
diately
... the pre–control value for the torque is smoothed (initial rounding–off).
Note:
In IM operation, a speed–torque–frequency pre–control is implemented due to the low dynamic
performance.
1465 Changeover speed MSD/IM (ARM) 0.0 100 000.0 100 000.0 RPM Imme-
diately
Above this, the drive runs, in IM operation with the speed set in this parameter.
P1465 = 0 pure IM operation
P1466 < P1465 < n
max
mixed operation, MSD/IM
P1465 > n
max
only MSD operation
Note:
When IM operation is selected, only pulse frequencies (P1100) of 4 and 8 kHz are permissi-
ble.
The parameter is preset to 0 when first commissioning, if there is no motor measuring
system (P1006 = 98, P1027.5 = 1).
1466 Changeover speed, closed–loop/open–
loop control IM (ARM)
150.0 300.0 100 000.0 RPM Imme-
diately
For pure IM operation (P1465 = 0), the drive is open–loop, current–frequency controlled below
the speed set using this parameter.
Note:
The parameter is preset when executing the ”calculate controller data”/”calculate unlisted
motor” function.