4.8 Permanent–magnet synchronous motor with field–weakening (PE spindle)
4-162
Siemens AG 2005 All Rights Reserved
SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition
The following parameters are used for the current controller adaptation:
Table 4-8 Parameter overview for the current controller adaptation
Parameters
No. Name Min. Stan-
dard
Max. Units Effective
1180 Lower current limit adaptation (SRM, SLM) 0.0 0.0 100.0 % Immedi-
ately
1181 Upper current limit adaptation (SRM, SLM) 0.0 100.0 100.0 % Immedi-
ately
1182 Factor, current controller adaptation (SRM,
SLM)
1.0 100.0 100.0 % Immedi-
ately
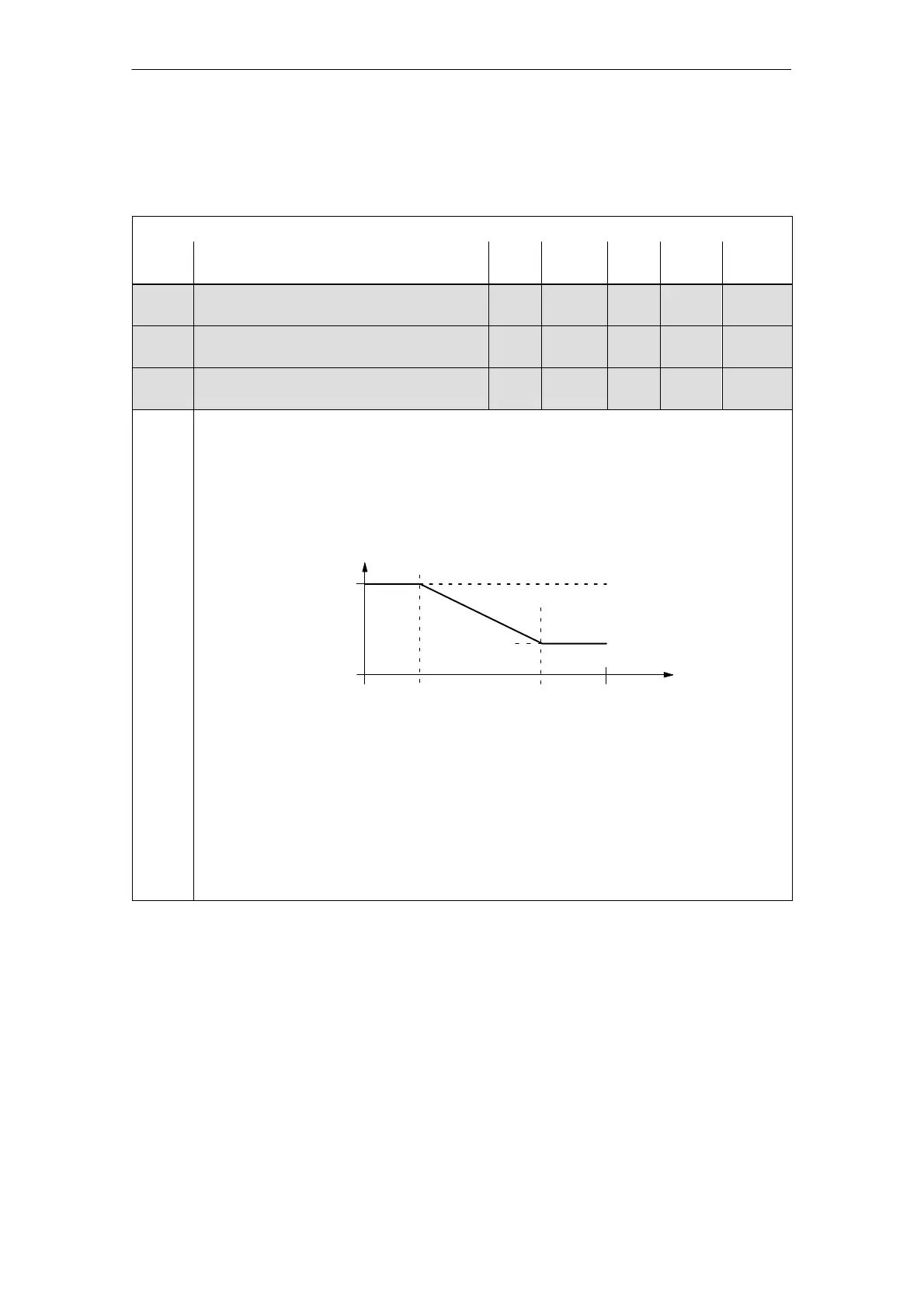
The P gain of the current control (K
P
, P1120) can be reduced, depending on the current, using
the controller adaptation.
The adaptation characteristic is defined using P1180, P1181 and P1182.
The following value pairs are obtained:
First value pair: P1180 / 100 %
Second value pair: P1181 / P1182
P1182
P1120
P1180 P1181
I
q
I
d
Proportional gain K
p
without
adaptation
with
adaptation
Constant lower current range: I
q
or I
d
< P1180
Adaptation range: P1180 < I
q
or I
d
< P1181
Constant upper range: I
q
or I
d
> P1181
Note:
P1180, P1181: Percentage values referred to P1104 (max. motor current)
P1182: Percentage value referred to P1120 (P gain, current controller)
The following applies: P1180 (lower current limit adaptation) < P1181 (upper current limit
adaptation)
0I
max
Parameter
overview