6
6.1 Operating mode, speed/torque setpoint (P0700 = 1)
6-337
Siemens AG 2005 All Rights Reserved
SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition
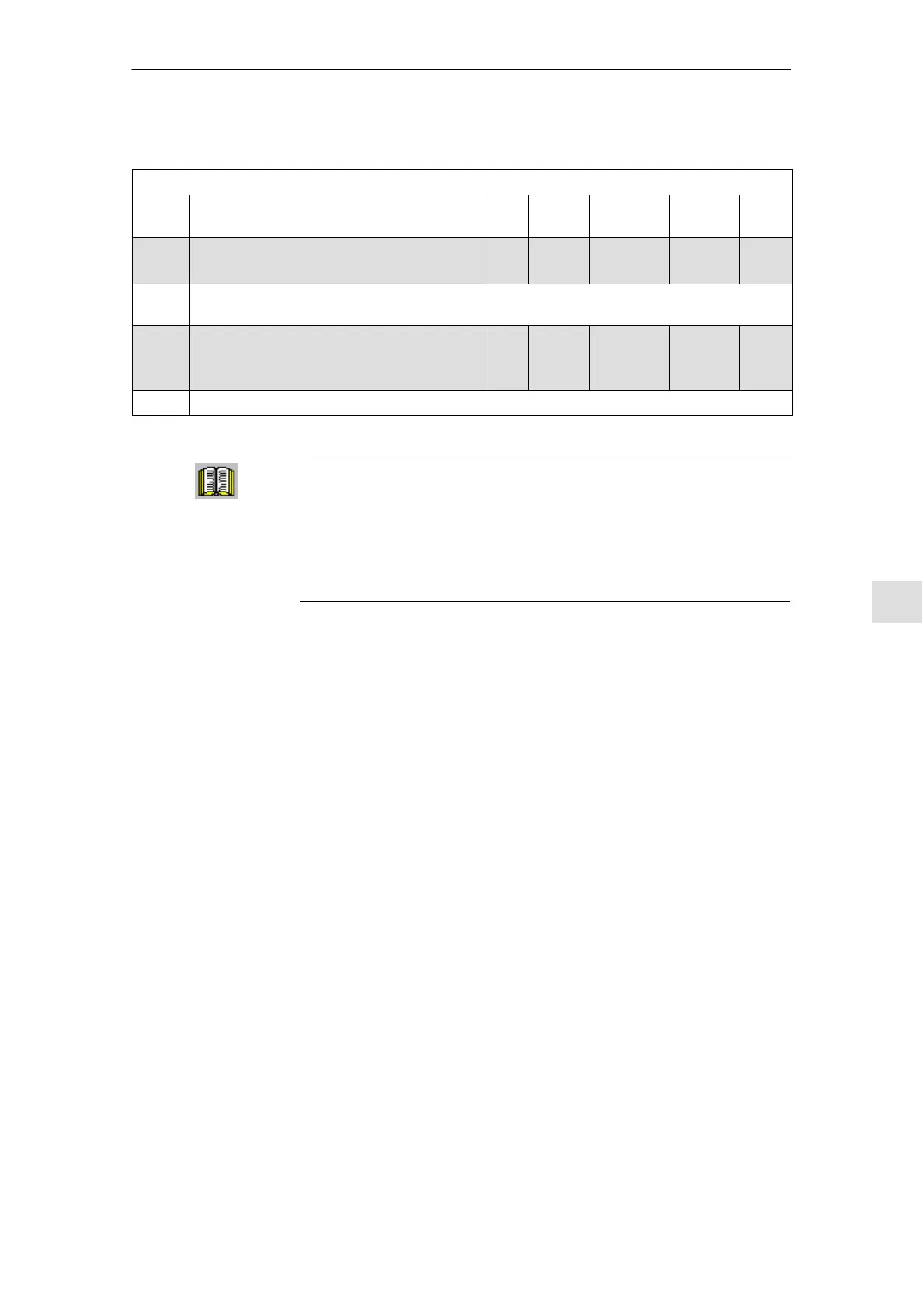
Table 6-2 Parameters for the speed controller optimization
Parameters
No. Name Min. Stan-
dard
Max. Units Effec-
tive
1407:8 P gain, speed controller (SRM, ARM)
P gain, velocity controller (SLM)
0.0
0.3
2 000.0
999 999.0
Nm*s/rad
Ns/m
Imme-
diately
... specifies the magnitude of the proportional (gain K
p
, proportional component) of the control
loop.
1409:8 Integral action time, speed controller (SRM,
ARM)
Integral action time, velocity controller (SLM)
0.0 10.0 500.0 ms
Imme-
diately
... specifies the integral action time (T
N
, integral component) of the control loop.
Reader’s note
When optimizing, e.g. linear drives, it may be necessary to set the
current and speed setpoint filters.
This procedure is described in:
Reference: /FBA/ SIMODRIVE 611D/SINUMERIK 840D/810D
Description of Functions, Drive Functions
6 Description of the Functions