6
6.2 Positioning mode (P0700 = 3, from SW 2.1)
6-385
Siemens AG 2005 All Rights Reserved
SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition
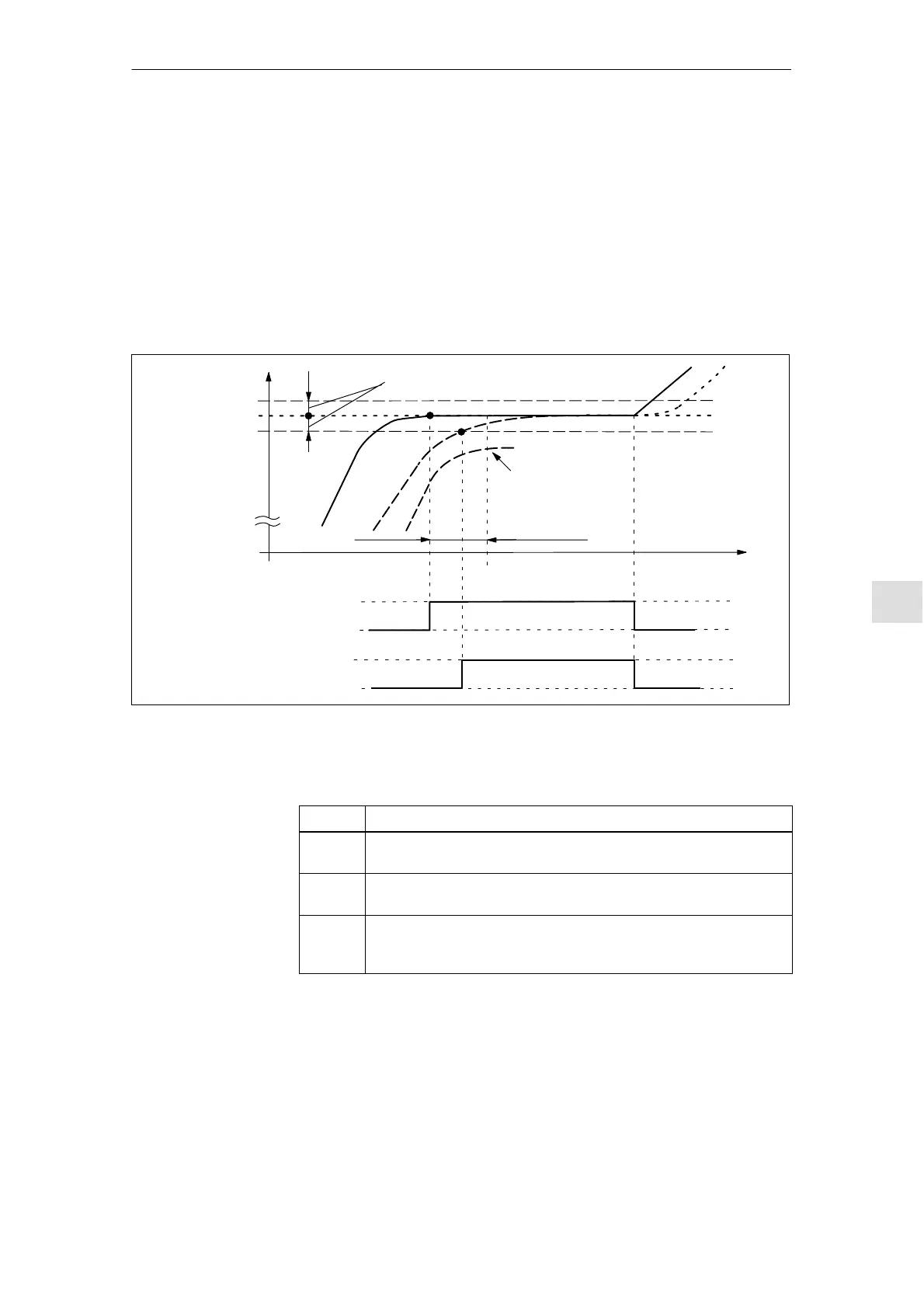
The positioning monitoring can be used to identify when the target posi-
tion is precisely approached.
In order to ensure that an axis is positioned within a specific time, after
a motion block has been completed (partial position reference value =
0, time t
1
in Fig. 6-18) the positioning monitoring time (P0320) is
started.
After this time has expired, it is checked once as to whether the posi-
tion actual value lies within the positioning window (P0321).
t
Positioning monitoring time
P0320
t
1
t
2
t
3
Target position
abc
Setpoint static
1 signal
0 signal
Reference position reached
1 signal
0 signal
Position
value
x
Positioning window P0321
Position
reference
value
Position
actual
value
Fault
Fig. 6-18 Positioning monitoring
Table 6-29 Explanation of curves a, b and c
Curve Description
a After the target position has been reached in t
1
the interpolator
starts the positioning monitoring time.
b From time t
2
the position actual value is within the positioning win-
dow. Positioning is considered as having been completed.
c After the positioning monitoring time has expired in t
3
, the position
actual value lies outside the positioning window. This results in an
error.
The following output signals are available
(description, refer under the index entry ”Output signal...”):
Output signal, ”setpoint static”
Output signal, ”reference position reached”
Positioning
monitoring
Mode of operation
Output signals
6 Description of the Functions