6
6.2 Positioning mode (P0700 = 3, from SW 2.1)
6-388
Siemens AG 2005 All Rights Reserved
SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition
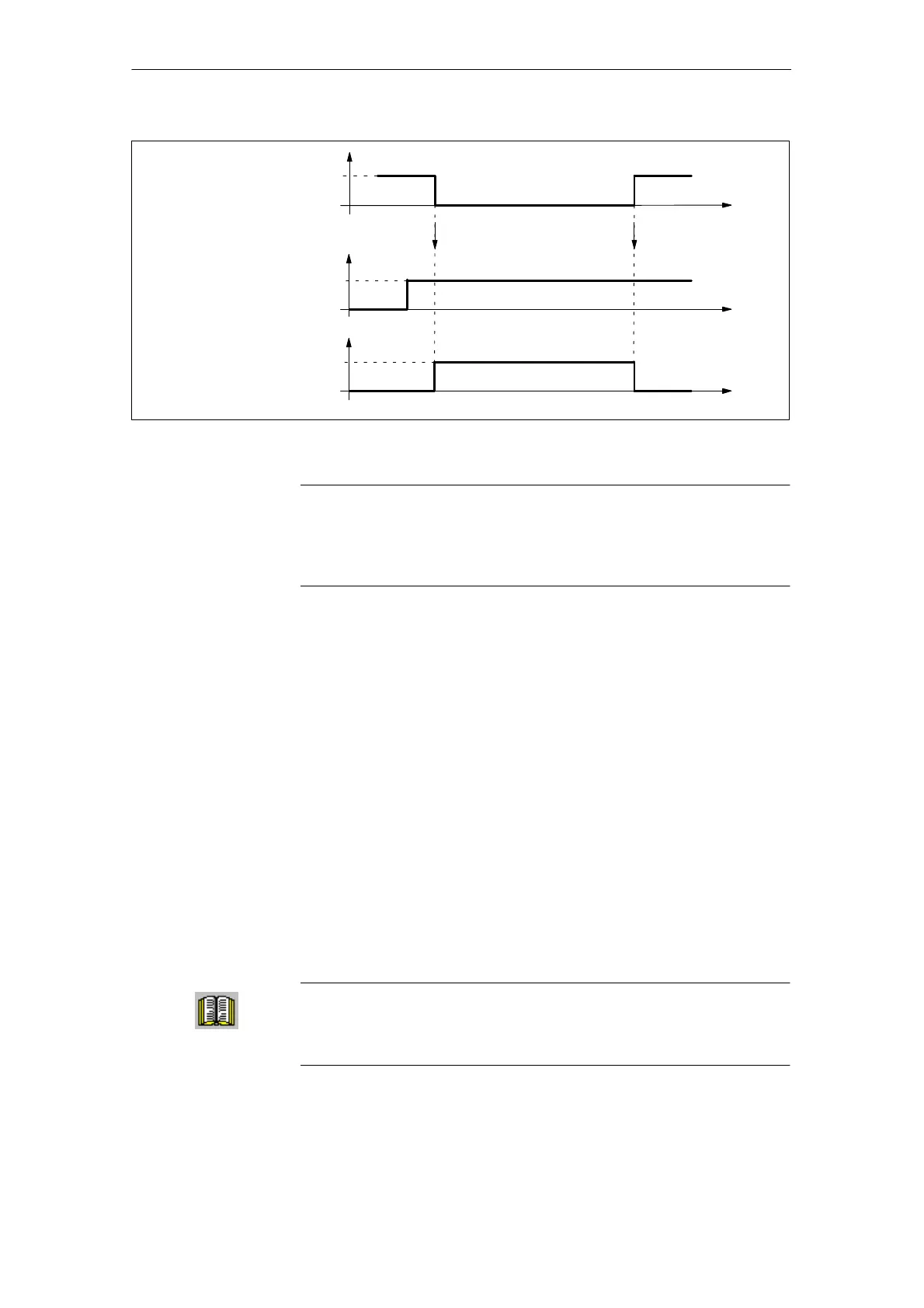
”Tracking mode”
input signal
”Tracking mode active”
output signal
Input terminal
controller enable,
terminal 65.x
The ramp–function
generator
(RFG, refer to Chapter
6.1.3) is activated
1
0
1
0
1
0
Fig. 6-19 Characteristics (time) in the tracking mode
Note
If the tracking mode is active and the input signal ”tracking operation”
is set, then the dynamic following error monitoring, the positioning
monitoring and the standstill monitoring are not effective.
The following parameters provide information about the actual motion
status of an axis:
P0020 Position reference value
P0021 Position actual value
P0022 Distance to go
P0023 Velocity setpoint
P0024 Velocity actual value
P0025 Effective override
P0026 Position act. value, ext. block change (from SW 3.1)
P0029 Following error
P0030 System deviation, position controller input
P0031 Actual Kv factor (position loop gain)
Reader’s note
The parameters are displayed and described in the parameter list is
Chapter A.1.
Diagnostics:
Motion
status of the axis
6 Description of the Functions
10.04
 Loading...
Loading...




