6
6.2 Positioning mode (P0700 = 3, from SW 2.1)
6-394
Siemens AG 2005 All Rights Reserved
SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition
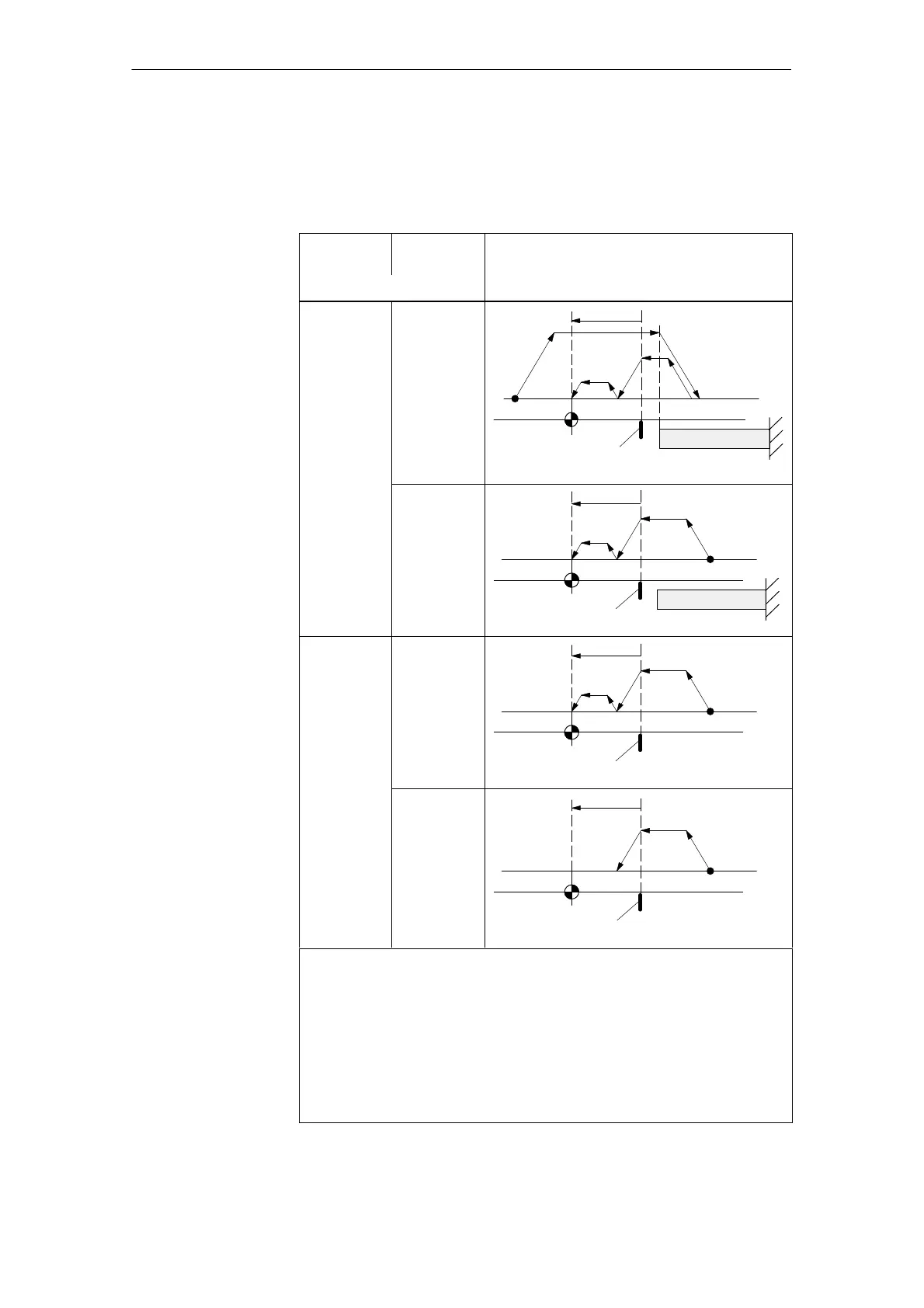
The referencing motion is shown in the following table as a function of
the reference cams.
Table 6-33 Sequence when referencing (homing) for an incremental
measuring system
With/with-
out
In front of/at Motion sequence
Reference cams
Axis
with
reference
Axis is in
front of
the
reference
cam
V
appr.
Reference cams
V
entry
V
shutd.
V
Start
R
K
Zero mark
(P0173=0)
Axis is at
the
reference
cam
Reference cams
V
entry
V
shutd.
R
V
Start
R
K
Zero mark
Axis
Axis tra-
verses/
moves to the
reference
point
(P0161=0)
1)
V
entry
V
shutd.
R
V
Start
R
K
Zero mark
erence cam
(P0173=1)
Axis tra-
verses/
moves to af-
ter the zero
mark
(P0161=1)
1)
(from SW
8.3)
V
shutd.
R
V
Start
R
K
H
M
Zero mark
Abbreviations:
V
appr.
P0163 (reference point approach velocity)
V
shutd.
P0164 (reference point shutdown velocity)
V
entry
P0165 (reference point entry velocity)
R
V
P0162 (reference point offset)
R
K
P0160 (reference point coordinate)
H
M
P0161 (stopping for marks)
1) When referencing (homing), the act. position is not displayed in SimoCom U.
Motion sequence
when
referencing
6 Description of the Functions
04.05
 Loading...
Loading...




