6
6.6 Analog inputs
6-533
Siemens AG 2005 All Rights Reserved
SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition
Table 6-52 Parameters for the n
set
mode, continued
Parameters
No. Effec-
tive
UnitsMax.Stan-
dard
Min.Description
0618 Normalization voltage
speed setpoint
5.0 9.0 12.5 V(pk) Imme-
diately
1401:8 Speed for max. useful motor speed
(SRM, ARM)
Velocity for max. motor useful velocity
(SLM)
–100 000.0 0.0 100 000.0
RPM
m/min
Imme-
diately
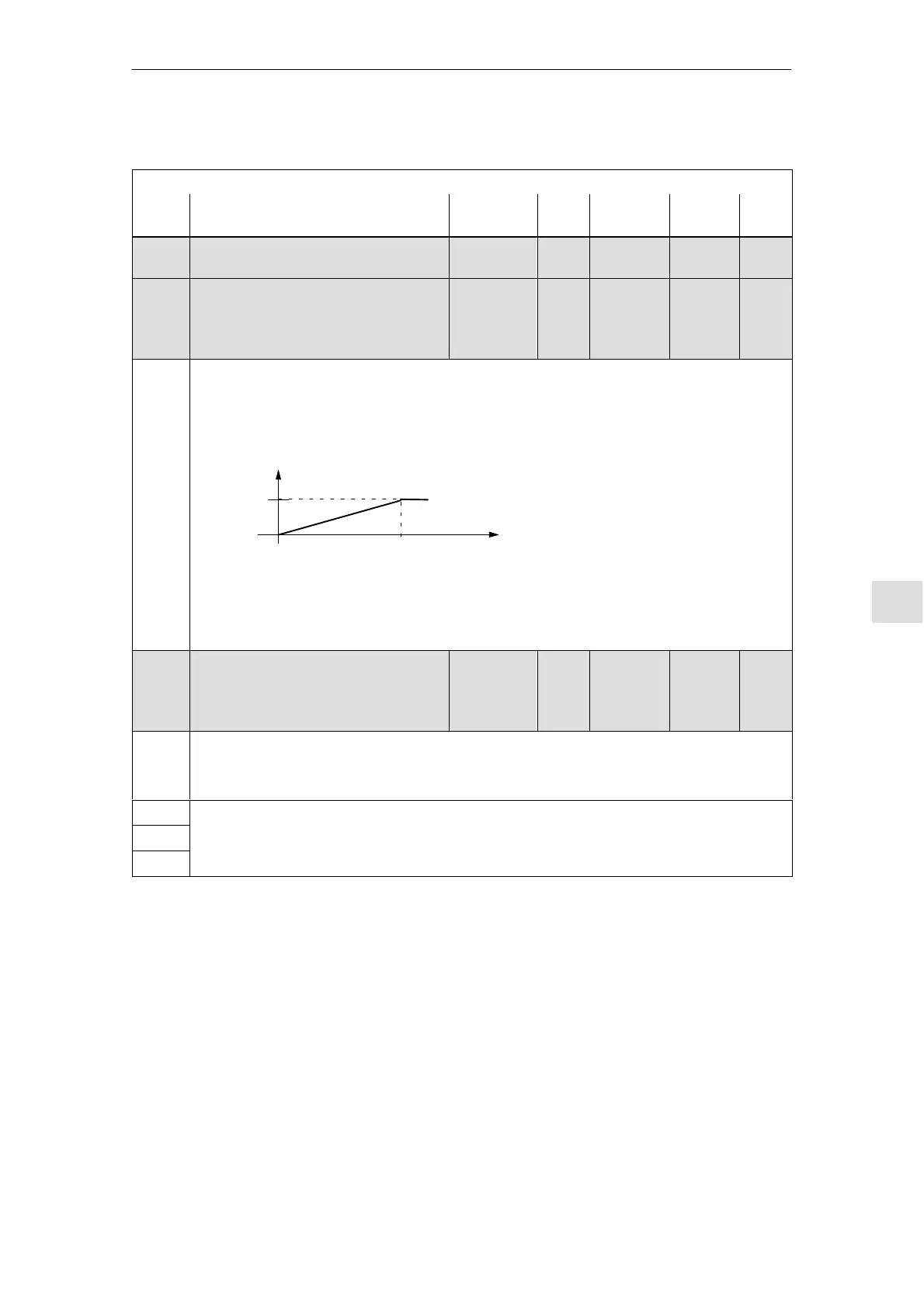
P0618: This defines the input voltage at which the maximum useful motor speed is reached.
P1401:8: The parameter specifies the maximum motor useful speed, and represents the refer-
ence value for P0618.
The standard value is pre–assigned for the hardware configuration depending on the
motor used.
P0618
Example:
P0618 = 9
P1401:8 = 2000
––> at 9 V, the motor reaches a speed
of 2000 RPM
U [V]
n [rev/min]
P1401:8
Note:
The maximum useful motor speed, set using P1401:8 is taken into account when calculating
the speed setpoint. This means that P1401:8 acts as a speed limit.
This is independent of whether the setpoint is entered via a terminal or PROFIBUS.
1240:8 Offset, torque setpoint (closed–loop
speed controlled) (SRM, ARM)
Offset, force setpoint (closed–loop
speed controlled) (SLM)
–50 000.0 0.0 50 000.0
Nm
N
Imme-
diately
This parameter value is added to the torque setpoint or force setpoint (SLM).
Note:
This allows a weight equalization to be set.
0620
1243
For the torque/power reduction via terminal 24.x/20.x (refer to Chapter 6.6.4), this parameter
can be used to make adjustments.
1244
can be used to make adjustments.
6 Description of the Functions