6
6.8 Angular incremental encoder interface (X461, X462)
6-557
Siemens AG 2005 All Rights Reserved
SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition
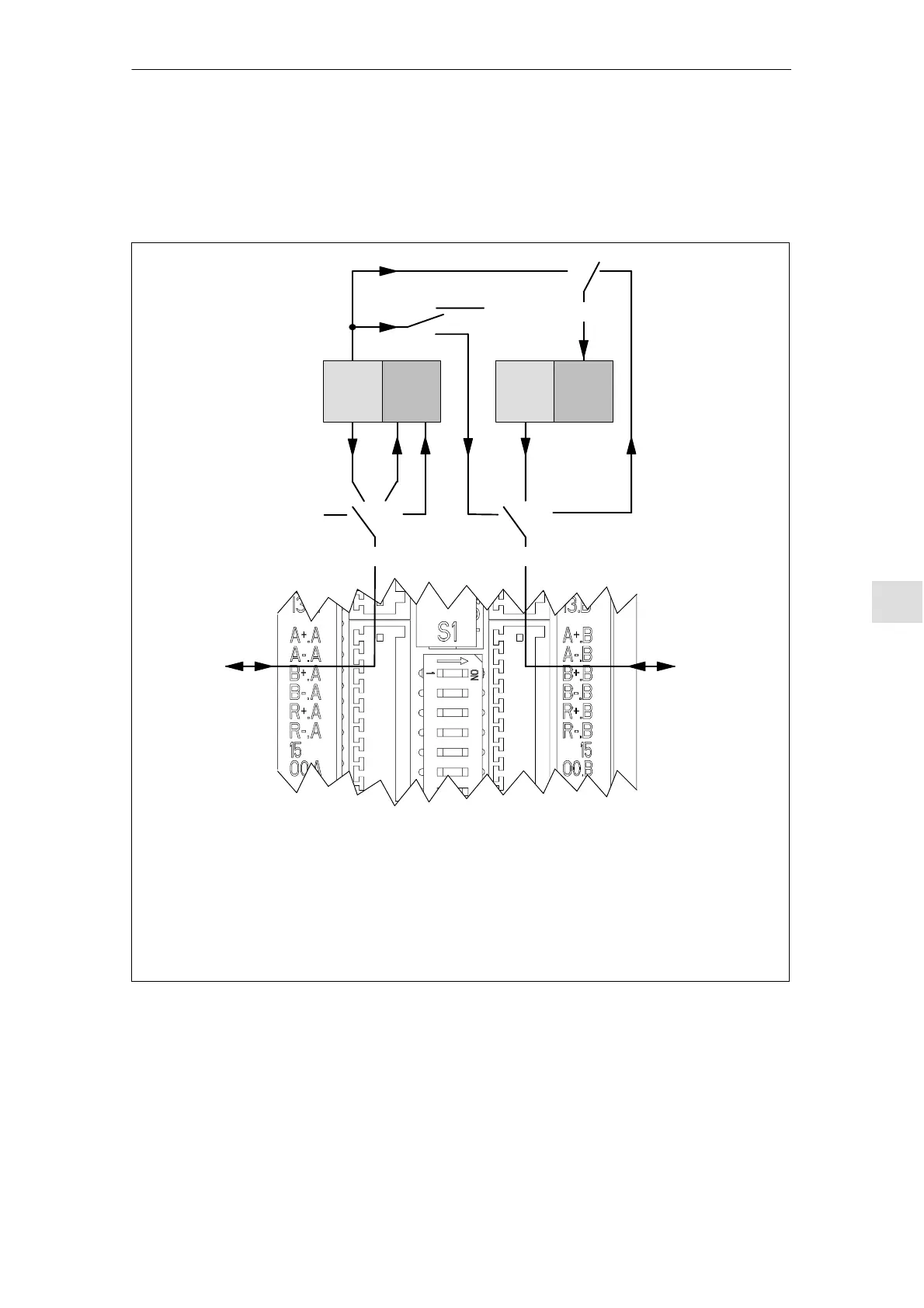
The angular incremental encoder interface is set for drive A and B
using P0890. For drive B, the position actual value of drive A can be
internally connected to the position reference value (position setpoint)
of drive B using P0891.
P0890 Activates the angular incr. enc./encoder interface
= 1 Switch as output
= 2 Switch as input (from SW 3.3)
= 3 Switch as input and
output actual values from A internally via B, from SW 3.3, only drive A)
P0891 Angular incremental encoder, position actual value coupling internal double–axis module
= 1 Actual value from A internally entered as setpoint for B, from SW 3.3, only drive B)
0
12
P0890 (A)
0
1
2
01
P0891 (B)
3
Angular
incremental
encoder
interface
Drive A
Term. A+.A
Term. A–.A
Term. B+.A
Term. B–.A
Term. R+.A
Term. R–.A
Pos.
act.
values
Pos.
ref.
values
Pos.
act.
values
Pos.
ref.
values
0, 1, 2
3
P0890 (A) P0890 (B)
Angular
incremental
encoder
interface
Drive B
Term. A+.B
Term. A–.B
Term. B+.B
Term. B–.B
Term. R+.B
Term. R–.B
Drive A Drive B
Fig. 6-64 Angular incremental encoder interface for drives A and B: Parameterized using P0890 and
P0891
Parameterizing the
angular
incremental
encoder interface
(P0890 and P0891)
6 Description of the Functions
05.00
 Loading...
Loading...




