6
6.14 Dynamic servo control (DSC, from SW 4.1)
6-604
Siemens AG 2005 All Rights Reserved
SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition
T
speed
Data
transfer
deadtime
Data
transfer
deadtime
Data
transfer
deadtime
Speed
setpoint
filter
2
Speed
setpoint
filter
1
Data
transfer
dead–
time
T
position
TDP
Interpolator
Interpolator
Speed
controller
Xerr
KPC
n
pre
Offset
Master
Drive
n
pre
xset
T
position
T
position
Xact
Path
inter–
polation
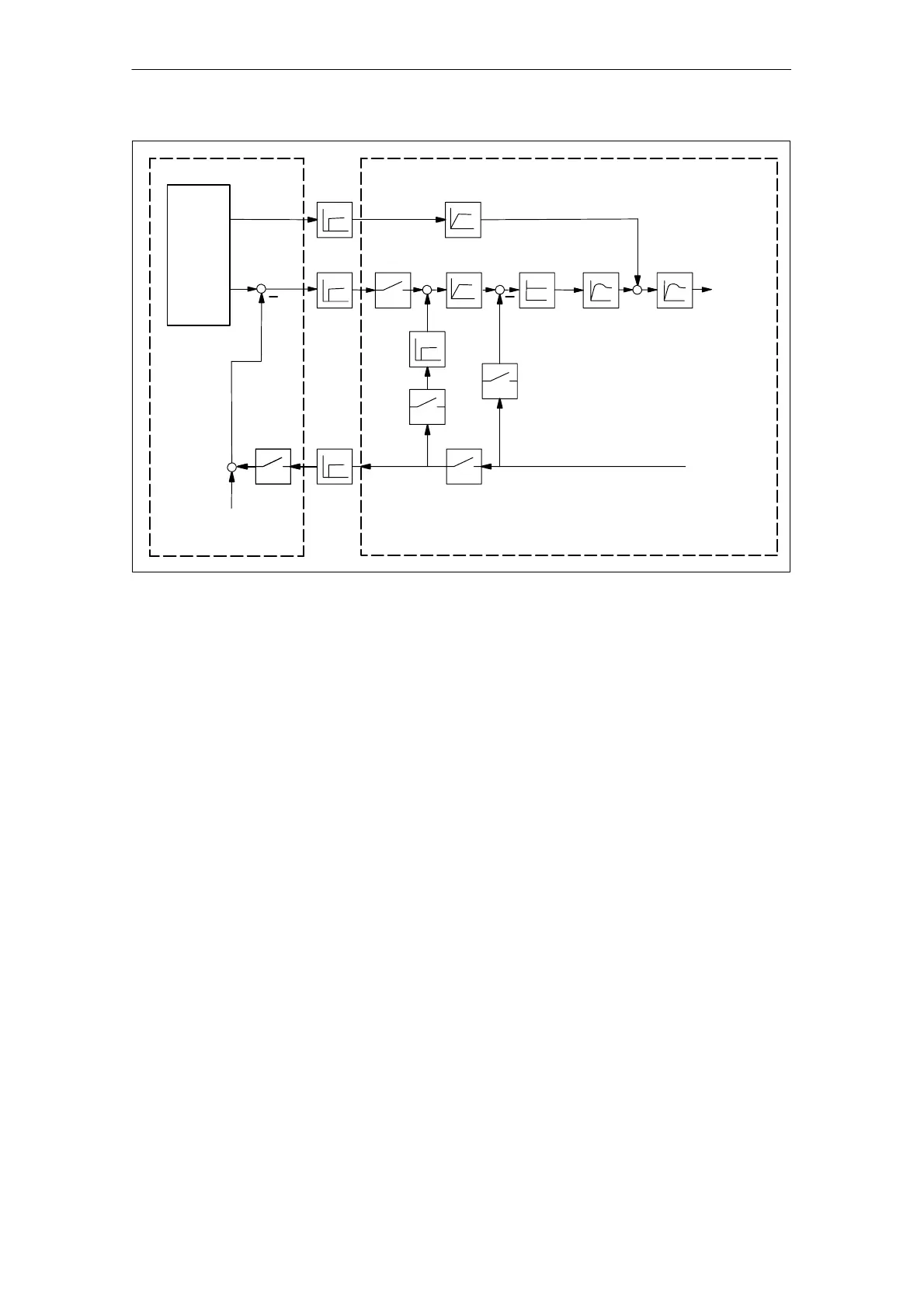
Fig. 6-83 Principle of dynamic servo control; the speed setpoint is used for speed precontrol
If the prerequisites for DSC have been fulfilled, the function is activated
by transferring a value for KPC > 0 in the PROFIBUS telegram.
When DSC is activated, the position controller gain in the master
should be set again.
The DSC function is de–activated by setting KPC = 0. Then, only the
speed pre–control is effective.
Higher gain factors can be set using DSC. This is the reason that the
control loop can become unstable when DSC is disabled. Before disab-
ling DSC (e.g. for optional tests) the KV factor must be reduced in the
master.
When using DSC, a speed setpoint filter is no longer required to round–
off the speed setpoint stages.
When using the DSC function, it only makes sense to use speed set-
point filter 1 to support the position controller, e.g. to suppress reso-
nance effects.
Activation
Deactivating
Speed setpoint
value filter
6 Description of the Functions
 Loading...
Loading...




