Configuration
5.3 Examples
1FW6 Built-in torque motors
Configuration Manual, 07/2017, 6SN1197-0AE00-0BP9
111
The following must be determined:
● Suitable torque motor
● Angular velocity ω in rad/s or speed n in rpm
● Angular acceleration α in rad/s
2
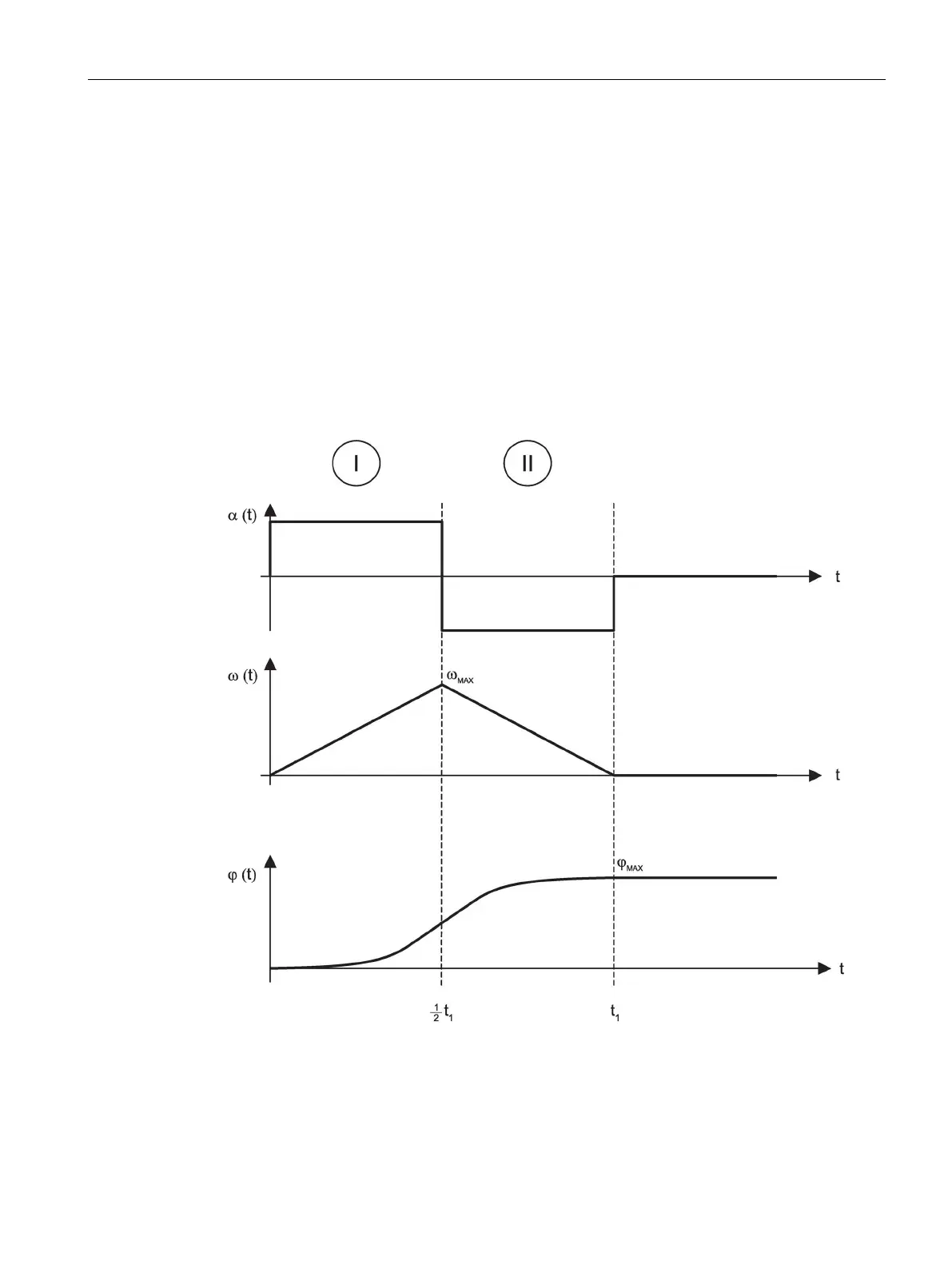
The shape of the traversing profile is not stipulated, but the angle to be traversed and the
duration are specified for this.
Provided that no restrictive requirements regarding angular acceleration and/or angular
velocity have been specified, the most straightforward suitable traversing operation simply
involves acceleration followed by deceleration.
Figure 5-11 Idealized depiction of the traversing profile with angular acceleration α (t), angular
velocity ω (t) and angle φ (t)

 Loading...
Loading...