08/2005 Expanding the Operator Interface (BE1)
8 Terms, Tables, Lists, Examples
© Siemens AG, 2005. All rights reserved
SINUMERIK 840D sl/840D/840Di/810D HMI Installation and Start-Up Guide (IAM) – 08/2005 Edition
BE1/8-187
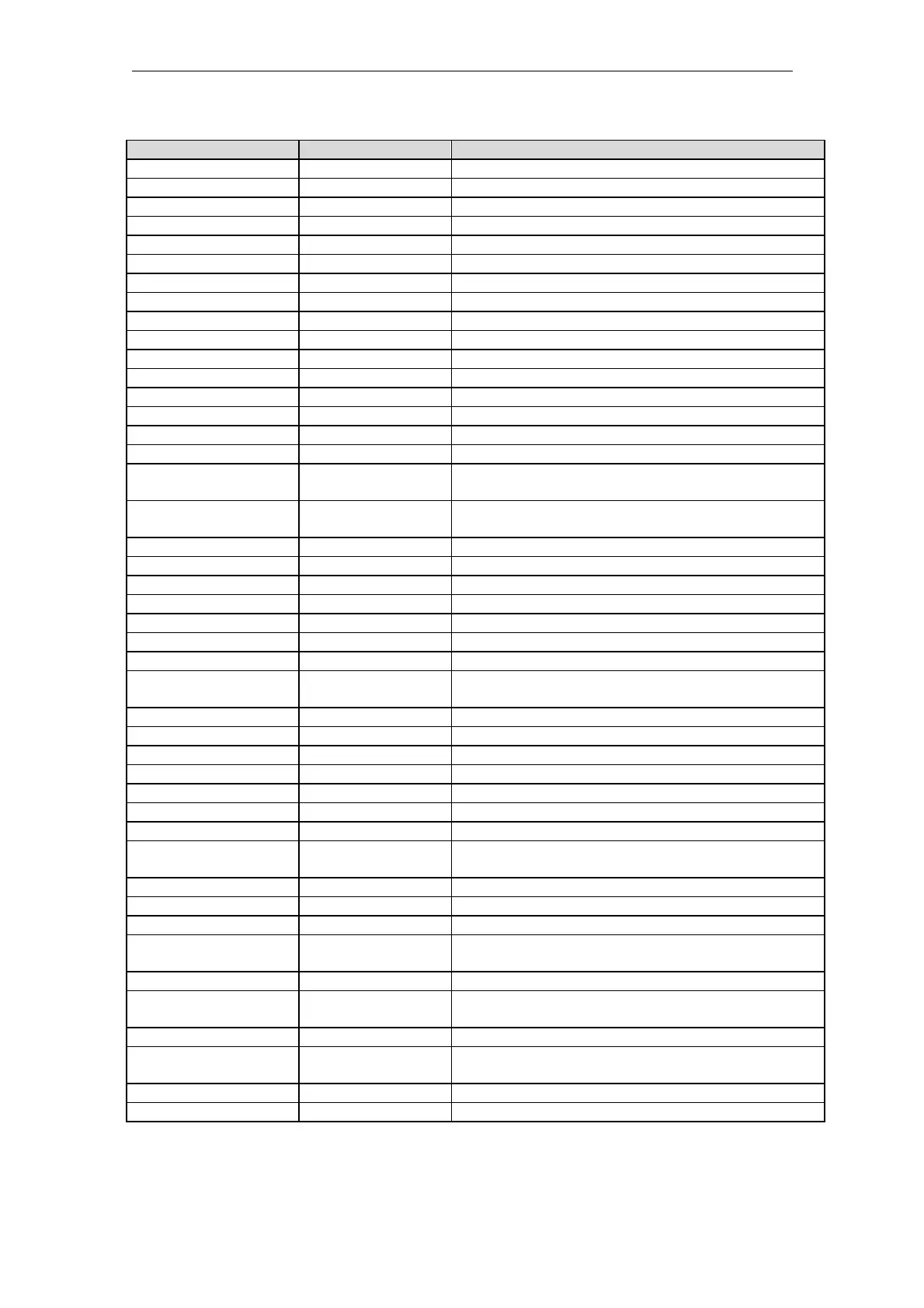
Name Index Description
$AA_IM[x] x=Axis Toolholder
$AA_IW[x] x=Axis Toolholder position, setpoint
$AA_LEAD_P[x] x=Axis Real leading value - position
$AA_LEAD_SP[x] x=Axis Simulated master value - position
$AA_LEAD_SV[x] x=Axis Simulated master value - velocity
$AA_LEAD_TYP[x] x=Axis Source of leading value
$AA_LEAD_V[x] x=Axis Real leading value - velocity
$AA_LOAD[x] x=Axis Drive load in % (for 611D only)
$AA_MM[x] x=Axis Measured value in machine coordinate system
$AA_MM1[x] x=Axis Access to meas. result in MCS
$AA_MM2[x] x=Axis Access to meas. result in MCS
$AA_MM3[x] x=Axis Access to meas. result in MCS
$AA_MM4[x] x=Axis Access to meas. result in MCS
$AA_MW[x] x=Axis Measured value in workpiece coordinate system
$AA_OFF[x] x=Axis Overlaid motion for programmed axis
$AA_OFF_LIMIT[x] x=Axis Limit value axial offset $AA_OFF reached
$AA_OSCILL_REVER
SE_POS1[x]
x=Axis Current reversal position 1 oscill. in synchr. act.
$AA_OSCILL_REVER
SE_POS2[x]
x=Axis Current reversal position 2 oscill. in synchr. act.
$AA_OVR[x] x=Axis Axial override for motion-synchronous actions
$AA_POWER[x] x=Axis Drive active power in W
$AA_S[x] x=SpindleNo Spindle speed, setpoint
$AA_SOFTENDN[x] x=Axis Software limit position, negative direction
$AA_SOFTENDP[x] x=Axis Software limit position, positive direction
$AA_STAT[x] x=Axis Axis status
$AA_SYNA_MEM Free memory for motion-synchronous actions
$AA_SYNC[x] x=Axis Coupling status of following axis in master value
coupling
$AA_TORQUE[x] x=Axis Drive torque setpoint in Nm
$AA_TYP[x] x=Axis Axis type
$AA_VACTB[x] x=Axis Axial feed, actual value
$AA_VACTM[x] x=Axis Axial feed, setpoint
$AA_VACTW[x] x=Axis Axial feed, actual value
$AA_VC[x] x=Axis Add. offset for path/axial feed
$AC_ALARM_STAT ESR alarm status
$AC_AXCTSWA[CTn] CTn=Axis container
no.
Axis container status
$AC_DELT Distance to go in the workpiece coordinate system
$AC_DRF[x] x=Axis DRF value
$AC_DTBB Distance from block start in basic coordinate system
$AC_DTBW Distance from the beginning of the block in the
workpiece coordinate system
$AC_DTEB Distance from block end in basic coordinate system
$AC_DTEPB Distance to go, feed oscillation in the tool coordinate
system
$AC_DTEPW Dist.-to-go infeed oscill. in workpiece coord. system
$AC_DTEW Distance from end of block in the workpiece
coordinate system
$AC_FCT0[x] x=PolynomNo a0 coefficient acc. to polynomial for synchr. action
$AC_FCT1[x] x=PolynomNo a1 coefficient acc. to polynomial for synchr. action

 Loading...
Loading...



















