Expanding the Operator Interface (BE1) 08/2005
8 Terms, Tables, Lists, Examples
© Siemens AG, 2005. All rights reserved
BE1/8-188 SINUMERIK 840D sl/840D/840Di/810D HMI Installation and Start-Up Guide (IAM) – 08/2005 Edition
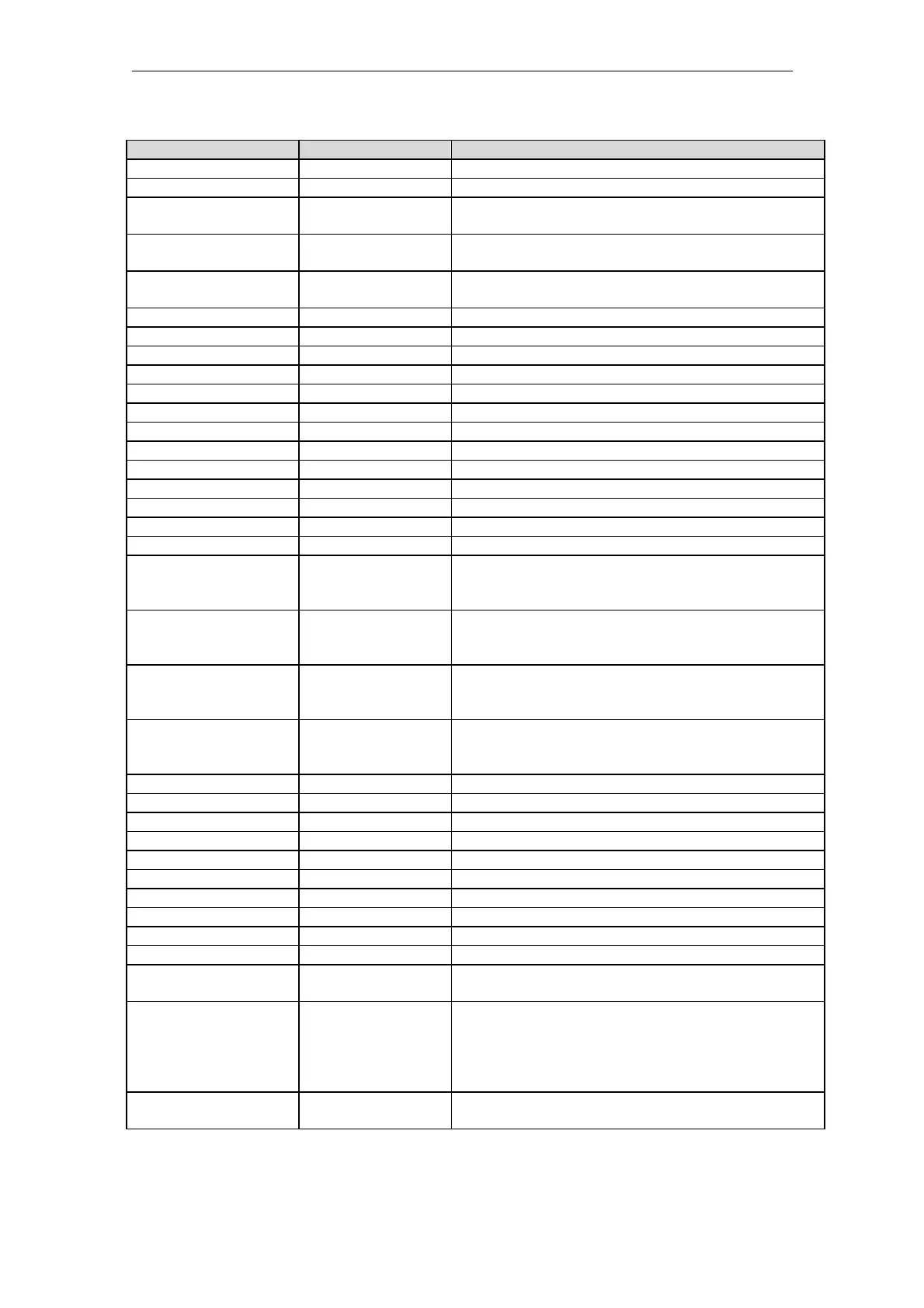
Name Index Description
$AC_FCT2[x] x=PolynomNo a2 coefficient acc. to polynomial for synchr. action
$AC_FCT3[x] x=PolynomNo a3 coefficient acc. to polynomial for synchr. action
$AC_FCTLL[x] x=PolynomNo Lower limit value after polynomial for synchronized
action
$AC_FCTUL[x] x=PolynomNo Upper limit value after polynomial for synchronized
action
$AC_FIFOx[y] x=FIFONo (1-10)
y=ParameterNo
FIFO variables for synchronous actions
$AC_MARKER[x] x=MarkerNo Marker var, counter for motion-synchronous actions
$AC_MEA Probe has responded
$AC_OVR Path override for synchronous actions
$AC_PARAM[x] x=ParameterNo Dyn. parameter for motion synchronization
$AC_PATHN Normalized path parameter
$AC_PLTBB Path travel from block beg. in basic coordin. system
$AC_PLTEB Path travel from block end in basic coordin. system
$AC_PRESET[x] x=Axis PRESET value
$AC_PROG Program status
$AC_RETPOINT[x] x=Axis Return position on contour for repositioning
$AC_SDIR[x] x=SpindleNo Rotat. status
$AC_SMODE[x] x=SpindleNo Spindle mode
$AC_STAT Channel status
$AC_TIME Time from the start of the block in seconds
(including the times for the internally generated
intermediate blocks)
$AC_TIMES Time from the start of the block in seconds (without
the times for the internally generated intermediate
blocks)
$AC_TIMEC Time from the start of the block in interpolation clock
cycles (including clock cycles for the internally
generated intermediate blocks)
$AC_TIMESC Time from the start of the block in interpolation clock
cycles (without the clock cycles for internally
generated intermediate blocks)
$AC_TIMER[x] x=TimerNo Timer location in seconds
$AC_VACTB Interpolation feedrate, setpoint
$AC_VACTW Path velocity in workpiece coordinate system
$AC_VC Add. path feed override for synchronous actions
$AN_AXCTAS[n] Actual axis container address (rotary position)
$AN_AXCTSWA [CTn] CTn=Axis con. no. Axis container rotation active
$AN_ESR_TRIGGER ESR start signal
$AN_MARKER[x] x=MarkerNo Marker variable for motion synchronous actions
$MC_DISPLAY_AXIS Bit 16-31 Machine axis identifier
$MC_DISPLAY_AXIS Bit 0-15 Identifier for geometry/auxiliary axis
$MC_MM_NUM_
BASE_FRAMES
Number of base frames in channel
$MN_EXTERN_
LANGUAGE
and
$MN_EXTERN_CNC_
SYSTEM
CNC system language
$MN_MAX_CUTTING
_EDGE_NO
Maximum value D number

 Loading...
Loading...



















