Motion synchronous actions
10.4 Actions in synchronized actions
Job planning
582 Programming Manual, 07/2010, 6FC5398-2BP40-0BA0
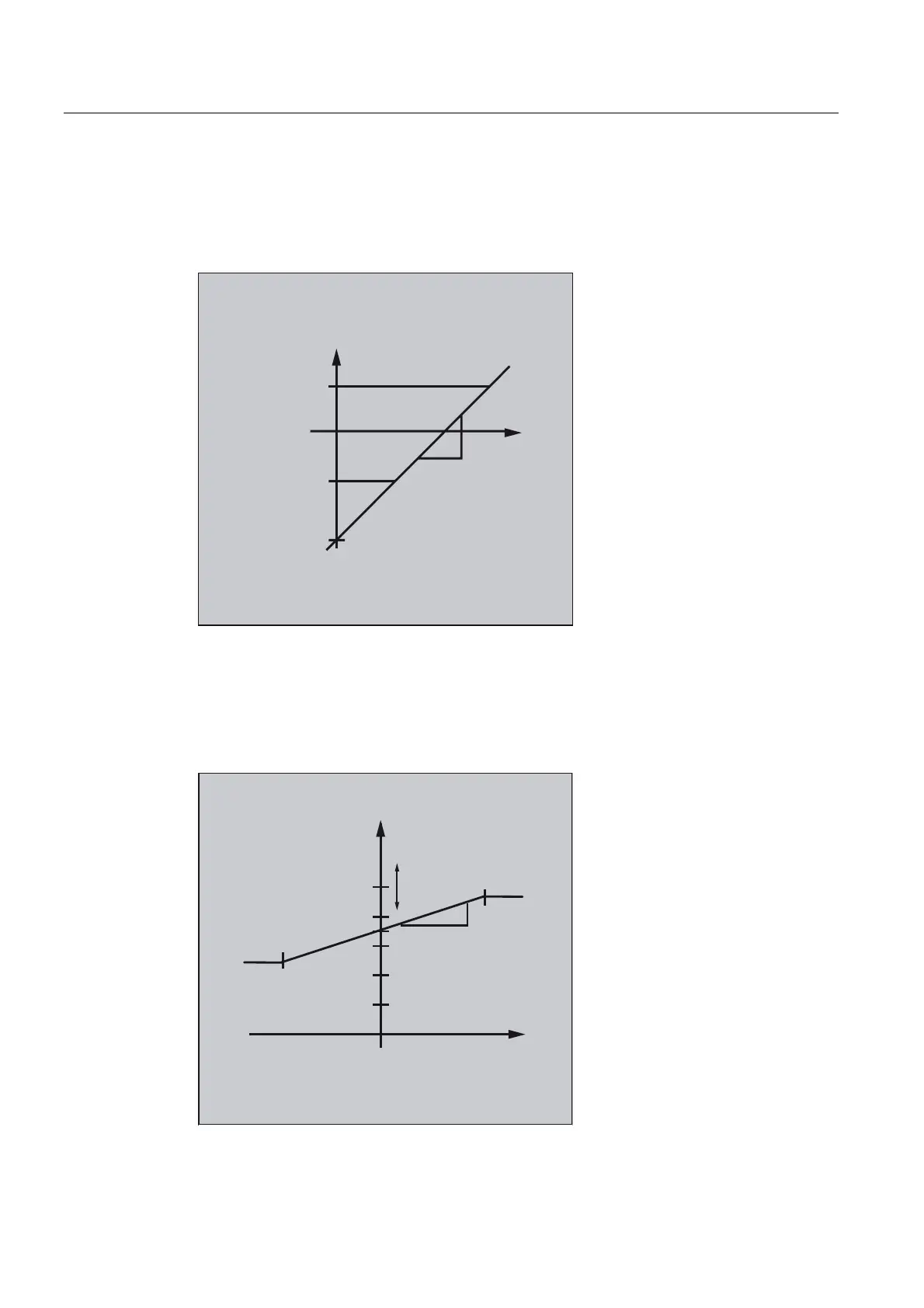
Example of a polynomial for straight section
With upper limit 1000, lower limit -1000, ordinate section a
0
=$AA_IM[X] and linear gradient 1
the polynomial is:
FCTDEF(1, -1000,1000,$AA_IM[X],1)
;
D
D
I;
/RZHUOLPLW
8SSHUOLPLW
Example of laser output control
One of the possible applications of polynomial definition is the laser output control.
Laser output control means:
Influencing the analog output in dependence on, for example, the path velocity.
>@
$&B)&7
(;
>@
$&B)&7//
>@
$&B)&782
>@
$&B)&78/
(QGRIWKHEORFN
%HJLQQLQJRIWKHEORFN

 Loading...
Loading...














