Argus Radar - SERIAL INTERFACE SPECIFICATIONS
988-10187-004 2.18
RSD – Radar system data
Radar display setting data.
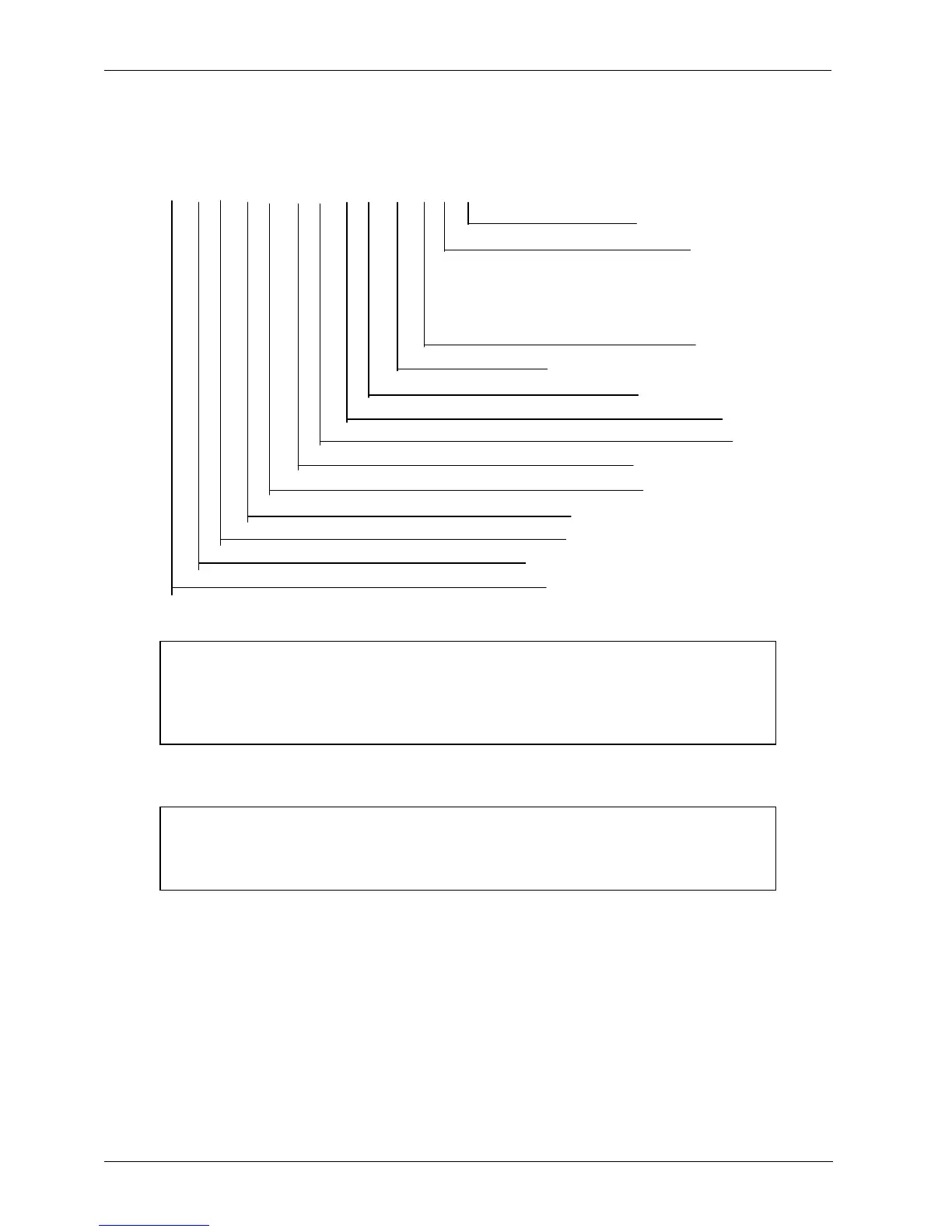
$--RSD, x.x, x.x,x.x, x.x,x.x, x.x,x.x, x.x,x.x, x.x, x.x, a, a*hh<CR><LF>
Display rotation (see Note 1)
Range units, K = km
N = nautical miles
S = statute miles
Range scale in use
Cursor bearing, degrees clockwise from 0°
Cursor range, from own ship
EBL 2, degrees
VRM 2, range
Origin 2 bearing (see Note 2)
Origin 2 range (see Note 2)
Bearing line 1 (EBL1), degrees from 0°
Variable range marker 1 (VRM1), range
Origin 1 bearing (see Note 2) degrees from 0°
Origin 1 range (see Note 2), from own ship
NOTE 1
Display rotation:
C = course-up, course-over-ground up, degrees true
H = head-up, ship's heading (centre-line) 0° up
N = north-up, true north is 0° up
NOTE 2
Origin 1 and origin 2 are located at the stated range and bearing from own
ship and provide for two independent sets of variable range markers (VRM)
and electronic bearing lines (EBL) originating away from own ship position.