Argus Radar - SERIAL INTERFACE SPECIFICATIONS
988-10187-004 2.17
OSD – Own ship data
Heading, course, speed, set and drift summary. Useful for, but not limited to radar/ARPA
applications. OSD gives the movement vector of the ship based on the sensors and
parameters in use.
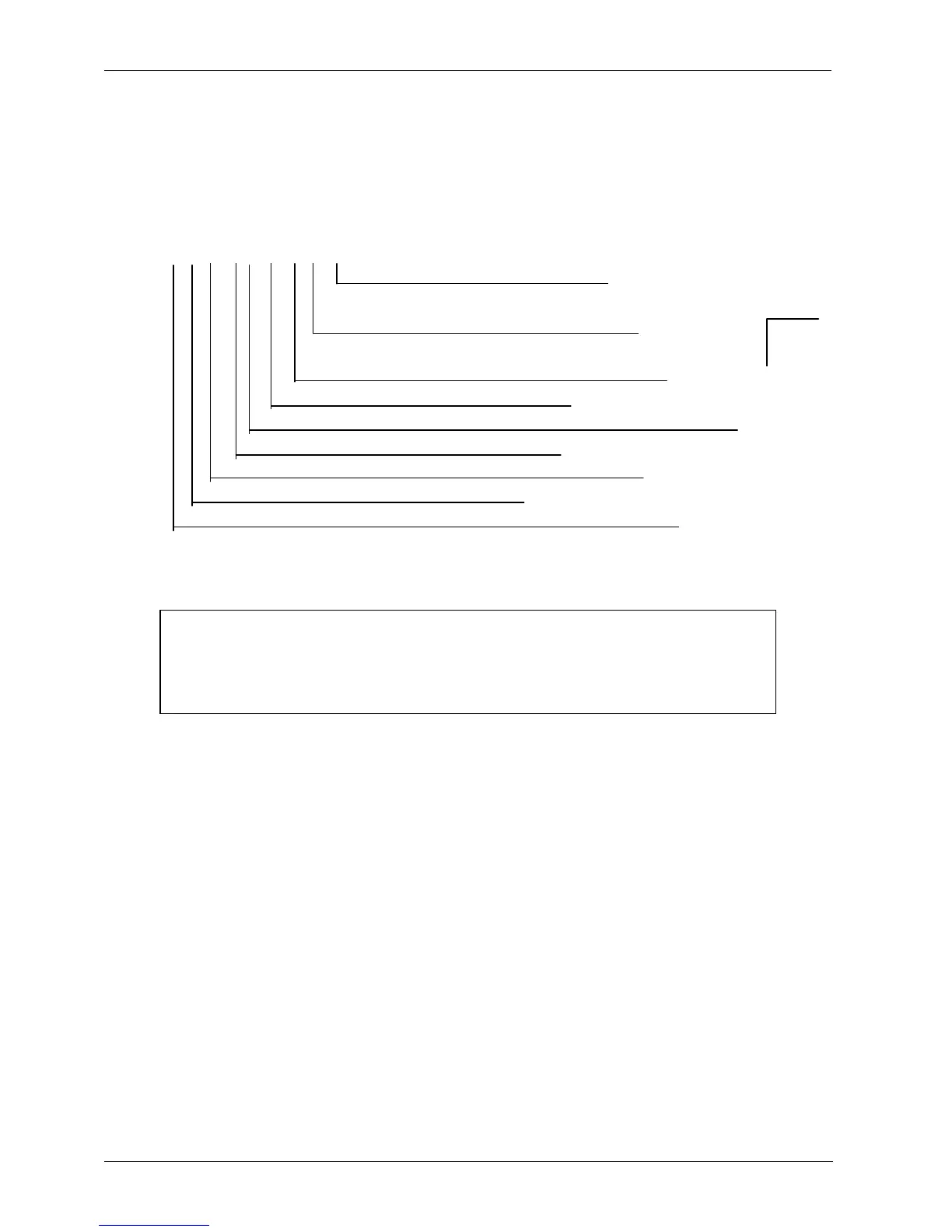
$--OSD, x.x,A,x.x, a,x.x,a,x.x,x.x,a*hh<CR><LF>
Speed units, K = km/h; N = knots;
S = statute miles/h
Vessel drift (speed) Manually
Entered
Vessel set, degrees true
Speed reference,B/M/W/R/P (see Note)
Vessel speed
Course reference, B/M/W/R/P (see Note)
Vessel course, degrees true
Heading status: A = data valid, V = data invalid
Heading, degrees true
NOTE
Reference systems on which the calculation of vessel course and speed is
based. The values of course and speed are derived directly from the
referenced system and do not additionally include the effects of data in the
set and drift fields.
B = bottom tracking log
M = manually entered
W = water referenced
R = radar tracking (of fixed target)
P = positioning system ground reference.