Argus Radar - SERIAL INTERFACE SPECIFICATIONS
988-10187-004 2.16
RMC – Recommended minimum specific GNSS data
Time, date, position, course and speed data provided by a GNSS navigation receiver. This
sentence is transmitted at intervals not exceeding 2 s and is always accompanied by RMB
when a destination waypoint is active. RMC and RMB are the recommended minimum data
to be provided by a GNSS receiver. All data fields should be provided, null fields used only
when data is temporarily unavailable.
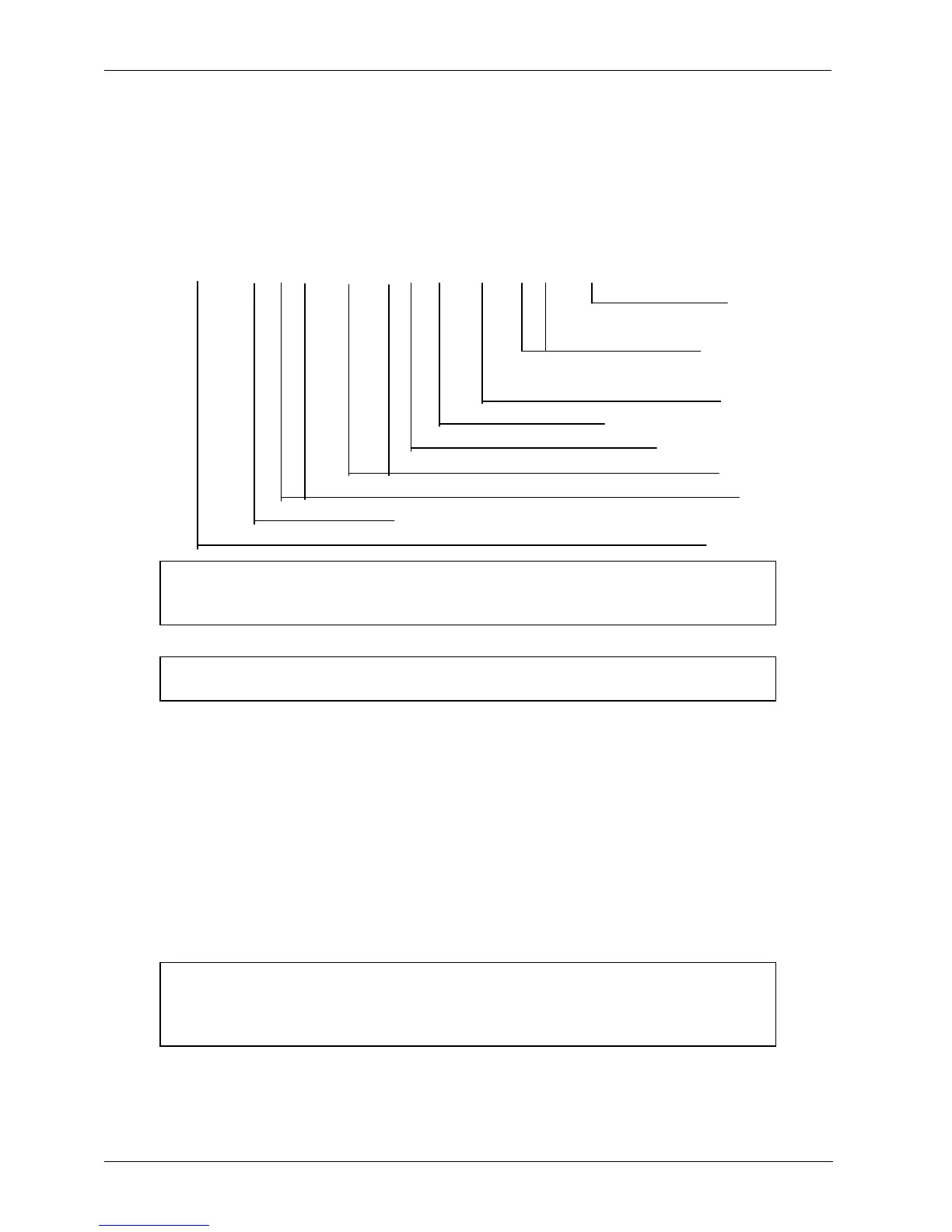
$--RMC, hhmmss.ss, A, llll.ll,a, yyyyy.yy, a, x.x, x.x, xxxxxx, x.x,a, a*hh<CR><LF>
Mode indicator
(see Notes 2 and 3)
Magnetic variation,
degrees, E/W (see Note 1)
Date: dd/mm/yy
Course over ground, degrees true
Speed over ground, knots
Longitude, E/W
Latitude, N/S
Status (see Note 3) A = data valid V = navigation receiver warning
UTC of position fix
NOTE 1
Easterly variation (E) subtracts from true course. Westerly variation (W)
adds to true course.
NOTE 2
Positioning system mode indicator:
A = Autonomous mode
D = Differential mode
E = Estimated (dead reckoning) mode
M = Manual input mode
S = Simulator mode
N = Data not valid
NOTE 3
The positioning system mode indicator field supplements the positioning
system status field (field No. 2) which should be set to V = invalid for all
values of mode indicator except for A = Autonomous