Argus Radar - SERIAL INTERFACE SPECIFICATIONS
988-10187-004 2.24
DPT – Depth
Water depth relative to the transducer and offset of the measuring transducer. Positive offset
numbers provide the distance from the transducer to the waterline. Negative offset numbers
provide the distance from the transducer to the part of the keel of interest.
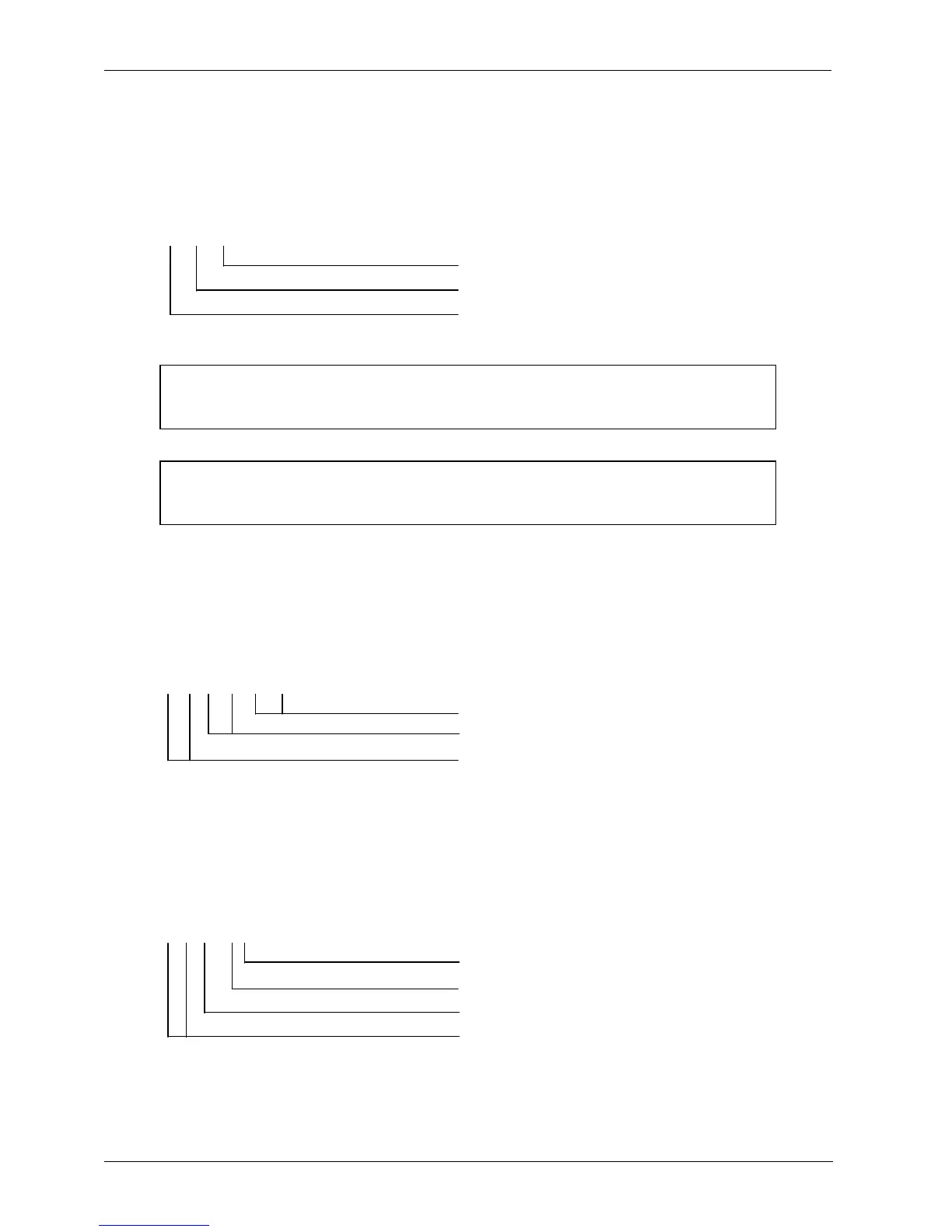
$--DPT, x.x, x.x, x.x*hh<CR><LF>
Maximum range scale in use
Offset from transducer, in metres (see Notes 1 and 2)
Water depth relative to the transducer, in metres
NOTE 1
“positive” = distance from transducer to water line; “-“ = distance from
transducer to keel.
NOTE 2
For IEC applications, the offset should always be applied so as to provide
depth relative to the keel.
DBT – Depth below transducer
Water depth referenced to the transducer.
$--DBT, x.x, f, x.x, M, x.x, F*hh<CR><LF>
Water depth, fathoms
Water depth, m
Water depth, feet
ROR – Rudder order status
Angle ordered for the rudder.
$--ROR,x.x,A,x.x,A,a*hh<CR><LF>
Command source location (as TRC)
Port rudder order (see Notes 1 and 2)
Status A = data valid, V = data invalid
Starboard (or single) rudder order (see Notes 1 and 2)
Status A = valid,V = data invalid