SOLO Communication Manual - UART and USB
www.solomotorcontrollers.com
September 2021 - Revision V_1.0.1 Copyright © 2021, All right Reversed. SOLO motor controllers.
25
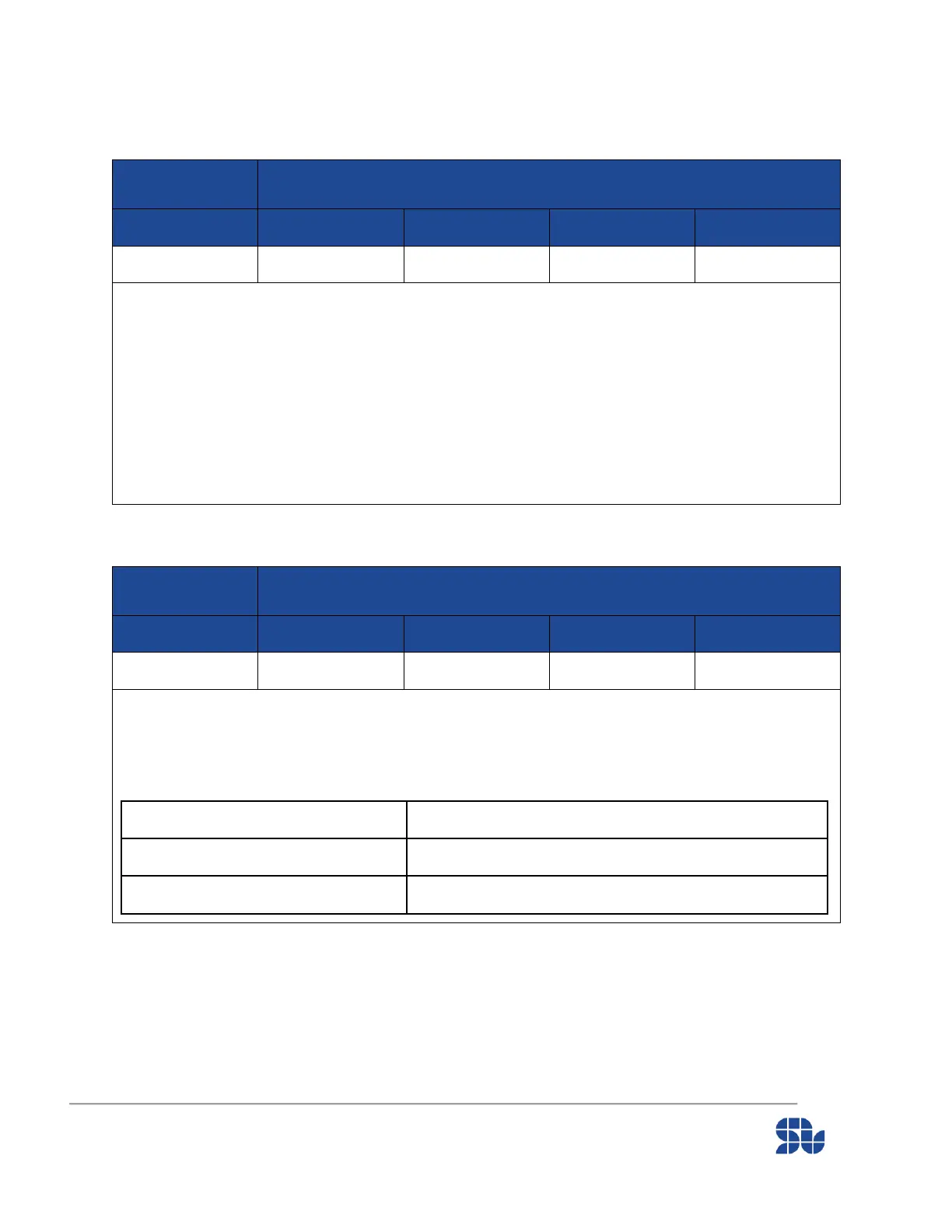
0x0B : Speed Controller Ki Gain
Description:
This command sets the Speed controller Ki gain, and it will be functional only in Digital Closed-
loop mode, since in Analogue mode this gain is set using the Potentiometer named with “Ki”
locally on the board.
This is the integral gain of the PI controller that SOLO uses to control to stabilize the speed of
a motor on a given reference point, This gain is normally for most motors takes a value in
between 0.0001 to 0.01 but there might be some cases that you need to go even higher, the
user has to increase/decrease these gains with care as they can cause instability for the device
under test if not selected properly. In theory, this gain helps the system to have zero steady-
state error.
0x0C : Motor’s Direction of Rotation
Motor Direction of Rotation
Description:
This commands sets the direction of the rotation of the motor either to ClockWise rotation or
to Counter Clockwise Rotation based on the table below,( In sensorless Modes, the order of
the wirings of the motor can invert the direction of rotation with respect to table below)
Desired Rotational Direction