2.8.6 Dismounting Axis 2 Reduction Gear
1) Remove the arm 2 cover. (See Para. 2.4.1.)
2) Dismount the axis 2 motor, referring to Steps 1) through 9) of Para. 2.5.5.
Remove the bearing from the disconnected gear case. It is recommended to
replace this bearing also together with the reduction gear.
Type of bearing used: 6807
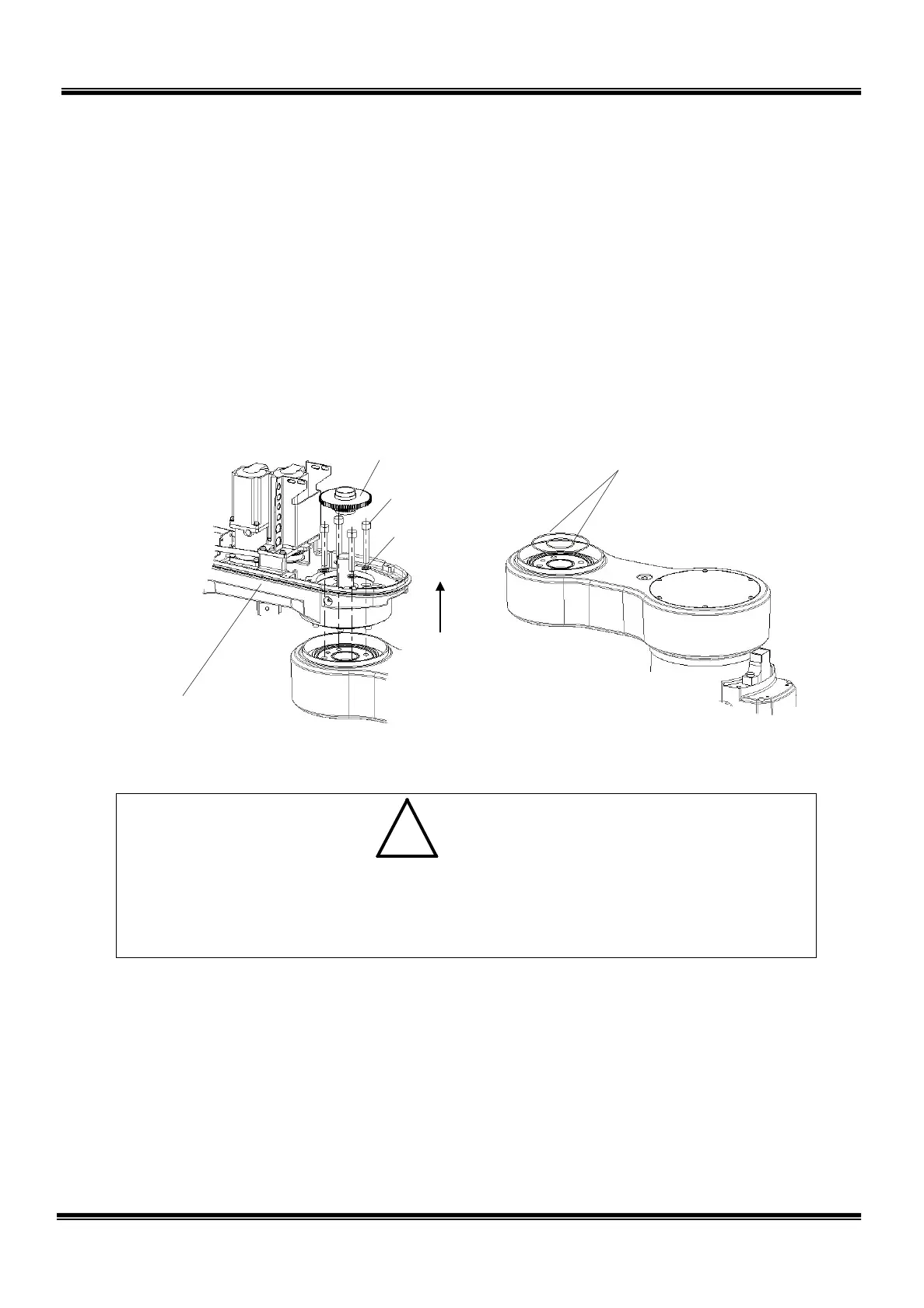
3) Draw out the center gear upward, remove the four (4) bolts (10 × 65) securing
the reduction gear, then disconnect the arm 2. As the two (2) “O” rings are set
on the axis 2 reduction gear set surface of the arm 1, be sure to remove them.
• The arm should always be mounted and dismounted by two (2) or more
persons. When removing the arm set bolts, take careful precautions because
the arm will drop. Also, if an excessively large impact is imposed on the arm,
the robot will be damaged.
4) Remove the center shaft secured to the axis 2 reduction gear with the four (4)
bolts (M3 × 8).
5) Remove the eight (8) bolts (M6 × 55), then dismount the axis 2 reduction gear.
Take careful precautions not to miss the exclusive “O” ring attached to the
bottom of the reduction gear.
The mass of the arm 2 is
about 2
0 kg. The hand,
are not
STE 85306
– 73 –
 Loading...
Loading...








