4.5 Restoring Home Position Data by ZEROP Function
Batteries for backing up the position information of the position detector are housed in
the base unit of the robot. Unless the robot has been used for a long term, the
battery voltage drops and the home position data will be lost. Also, when the battery
voltage for backing up the internal memory of the X8GC printed board has dropped,
user’s set programs, parameters and absolute coordinates will be lost. To avoid this,
replace the batteries on a regular basis.
When the robot arm is moved fast during power OFF, the absolute coordinate counter
cannot follow the robot motion, resulting in destruction of the home point data.
This paragraph deals with the restoring procedures when the home position data was
destroyed by mistake.
This restoring operation may cause some error according to the adjusting method.
4.5.1 Preparation before Restoring Operation
1) Turn on the controller power and align the home point match-marks of each axis
in the manual mode.
2) If this is not possible, mark the reference position of each axis and jot down its
coordinate beforehand.
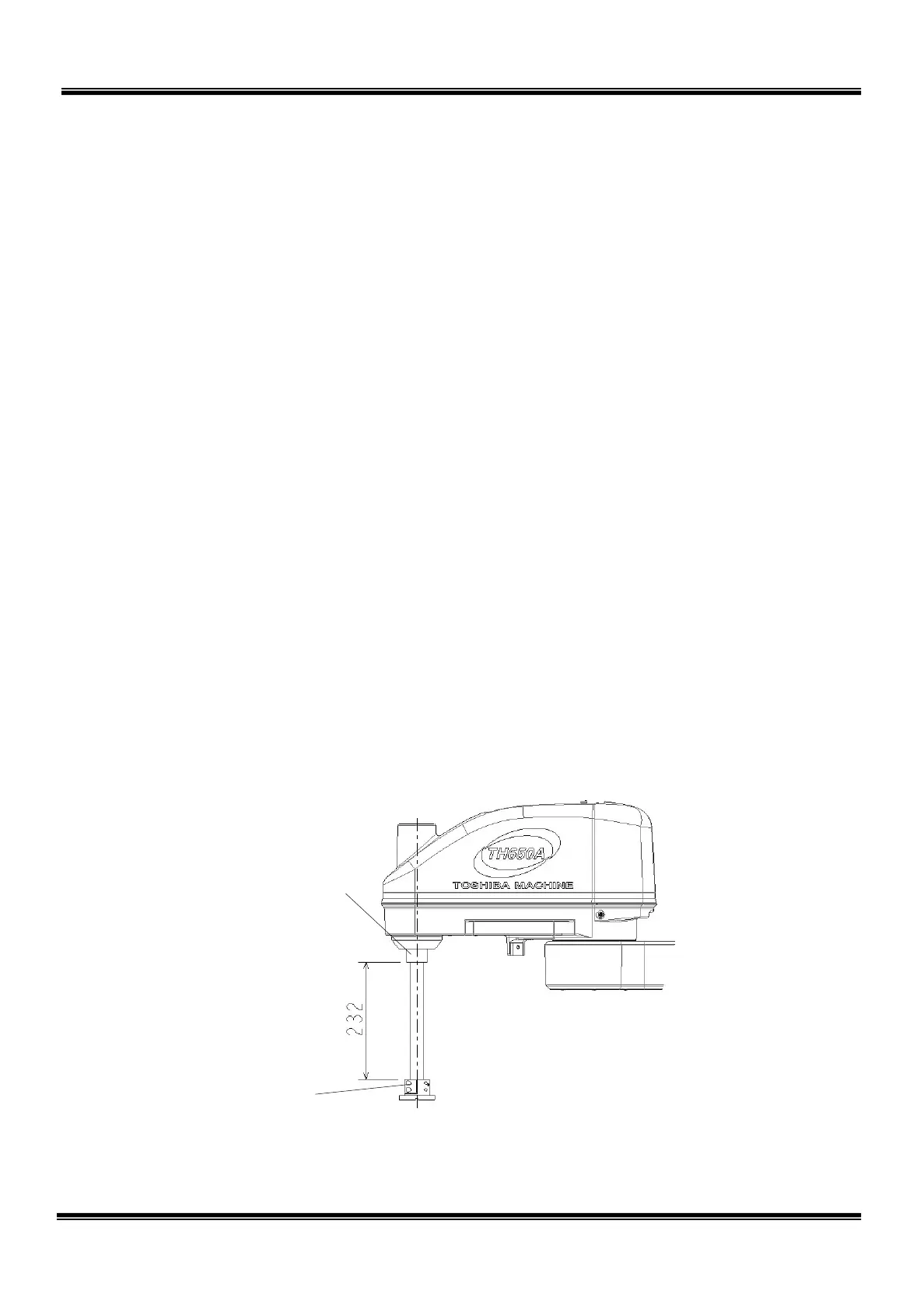
3) Move the axis 3 down to near the lower limit and set it to the dimension shown in
the figure below (i.e., distance between the boss end surface of tool shaft and the
tool flange end surface).
Fig. 4.2 Dimension of axis 3 home point
This figure shows when the standard
axis stroke (200 mm) is used.
When the optional axis stroke (400 mm)
is selected, the length is 432 mm.
STE 85306
– 106 –
 Loading...
Loading...








