110
relative to the base coordinate system. Roll, Pitch, Yaw represents the
angular values of orientation relative to the base coordinate system.
After this offset setting, user coordinate system becomes the world
origin instead of robot base.
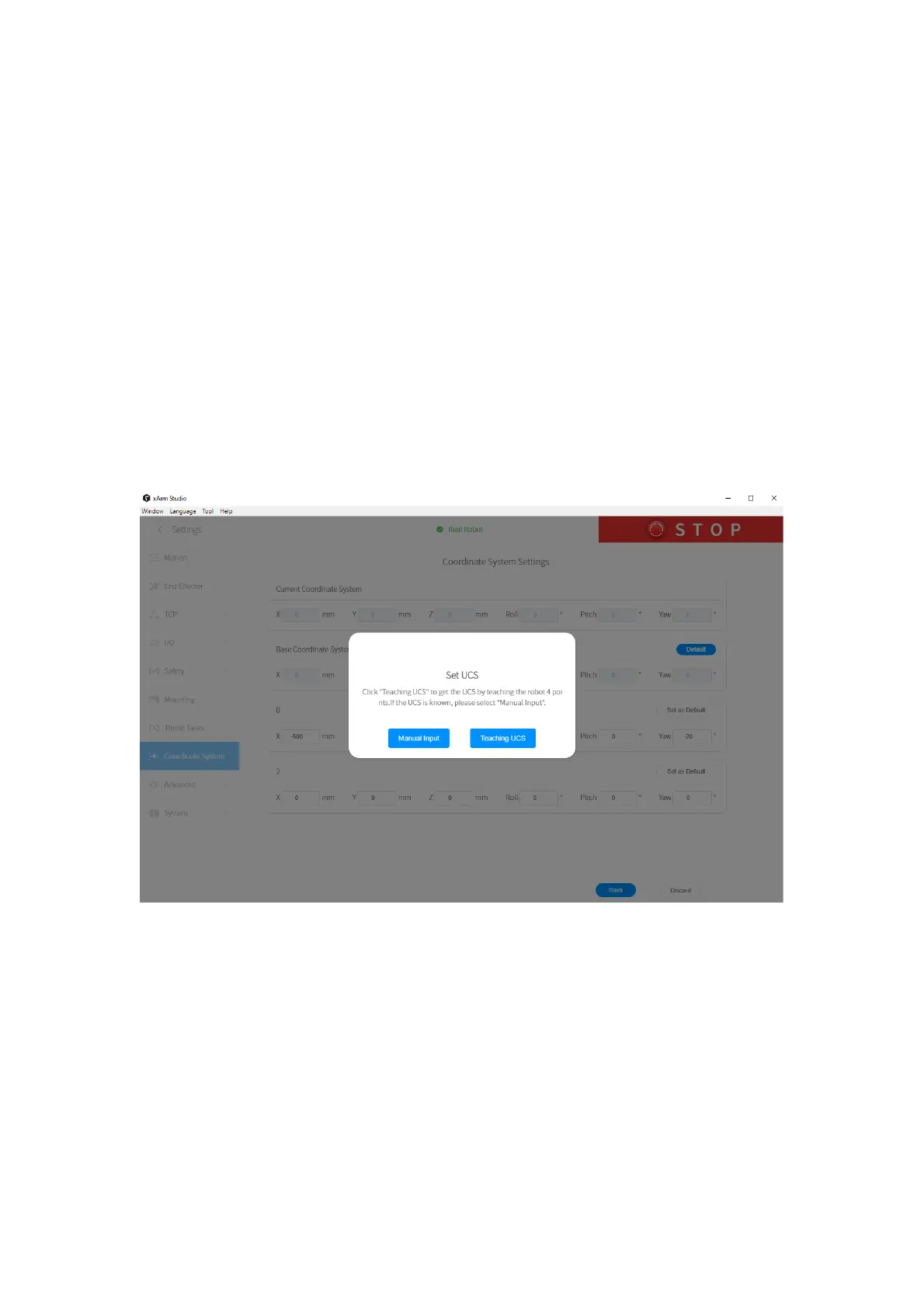
【New】: Create a new user coordinate offset.
When creating a new base coordinate offset, there are two ways to set
the new base coordinate offset parameters, as shown in the figure
below:
1) Manual Input
When the base coordinate offset parameter is known, you can choose to
manually input its base coordinate offset parameter.
2) Teaching UCS
When the base coordinate offset parameter is unknown, click the [Teach
and Acquire] button to obtain the base coordinate offset parameters by