122
● When the mode is turned on, it will prevent the xArm from causing self-
collision.
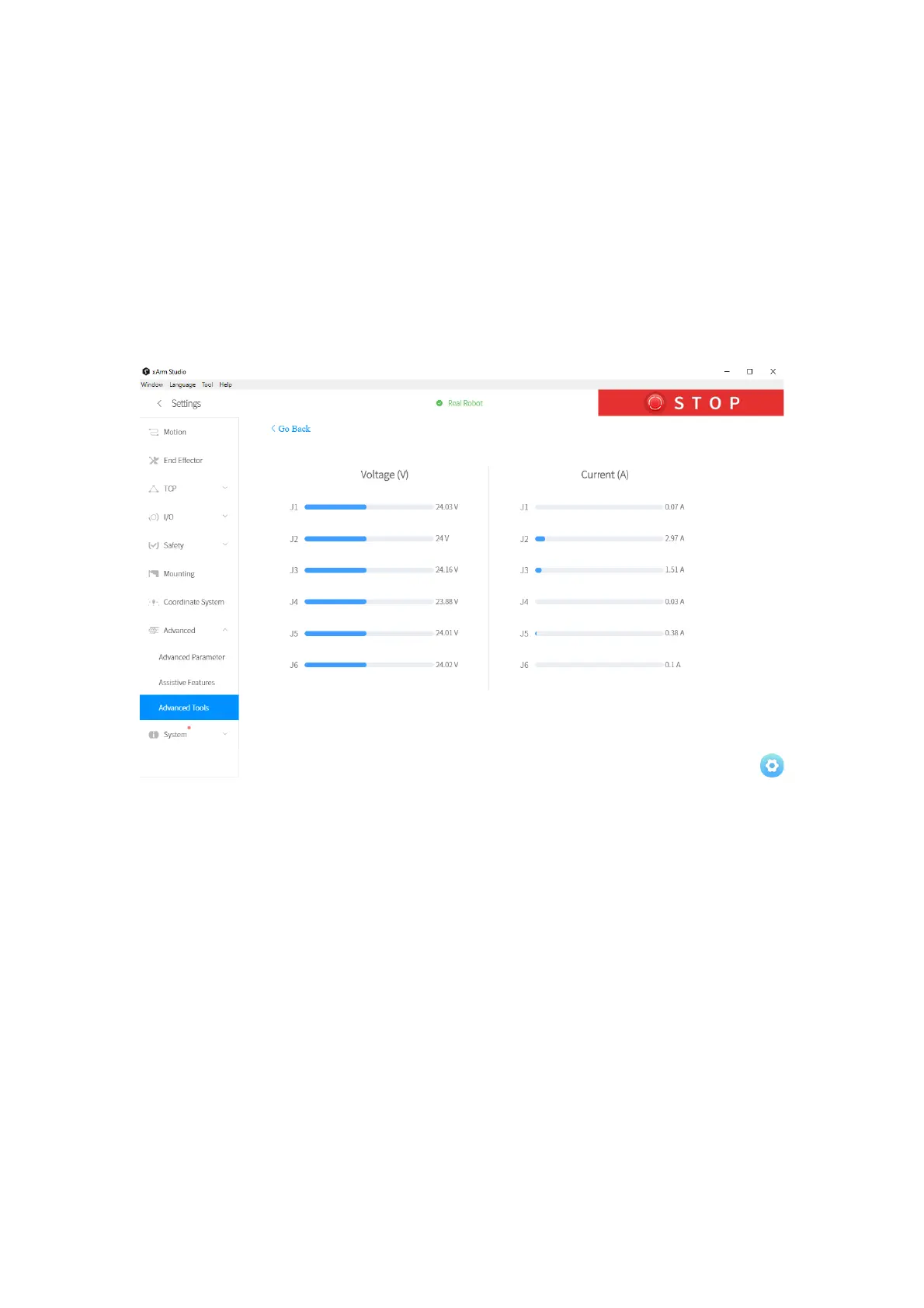
Joint Tools
1. Joint Status
In this interface, you can get the joint current value and joint voltage value
of the robotic arm.
The range of the joint voltage value of the robotic arm is: [0, 50V]
The range of the joint current value of the robotic arm is: [0, 35A]
Note: When using the above functions, the joint firmware version≥ 2.7.0.