125
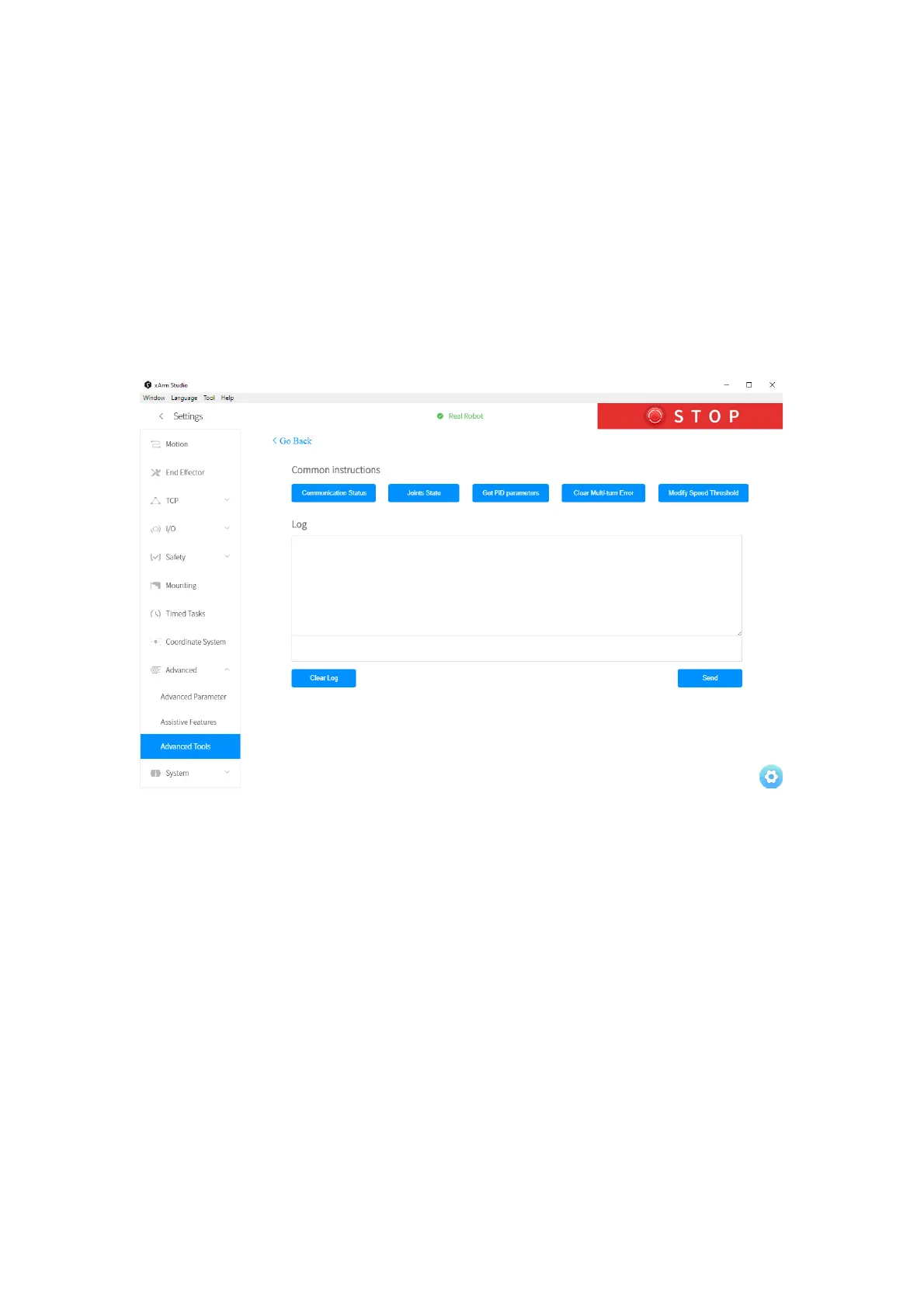
3. Joint Debug
The user can obtain the following information of the robotic arm by
clicking the corresponding button: communication status, joint status,
and PID parameters. And you can clear the multi-turn error of the robotic
arm and modify the speed threshold of the robotic arm.
Note: This function should be completed under the guidance of technical
support.
(Please contact the technical support by the email: support@ufactory.cc)