2.5.2.1. Default Safety Configuration
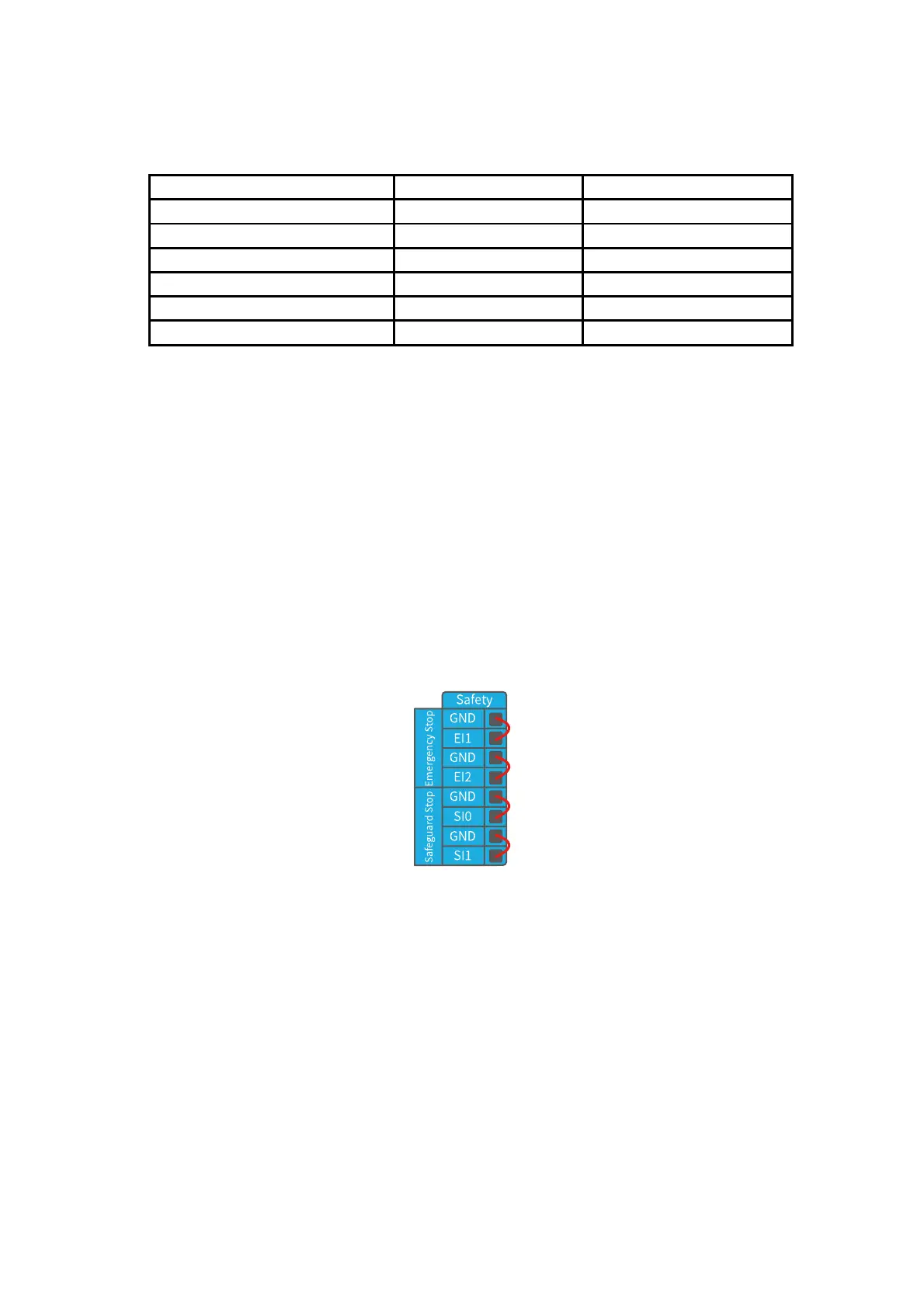
The robotic arm has been configured by default and can be operated
without any additional safety equipment, as the figure below. If there is
a problem with the robotic arm, please check the following figure for the
correct connection.
2.5.2.2. Connect to the Emergency Stop Button
In most applications, one or more additional emergency stop buttons
are required. The figure below shows how to connect one or more
emergency stop buttons.