92
【TCP Offset】
● Setting the Tool Coordinate Offset with respect to the initial tool
frame located at the center of the flange (Frame B in the
above figure). The position coordinates X, Y, and Z determine the
position of TCP, while Roll, Pitch, and Yaw determine the orientation.
When the specified value is zero, TCP coincides with the centre point of
the tool output flange.
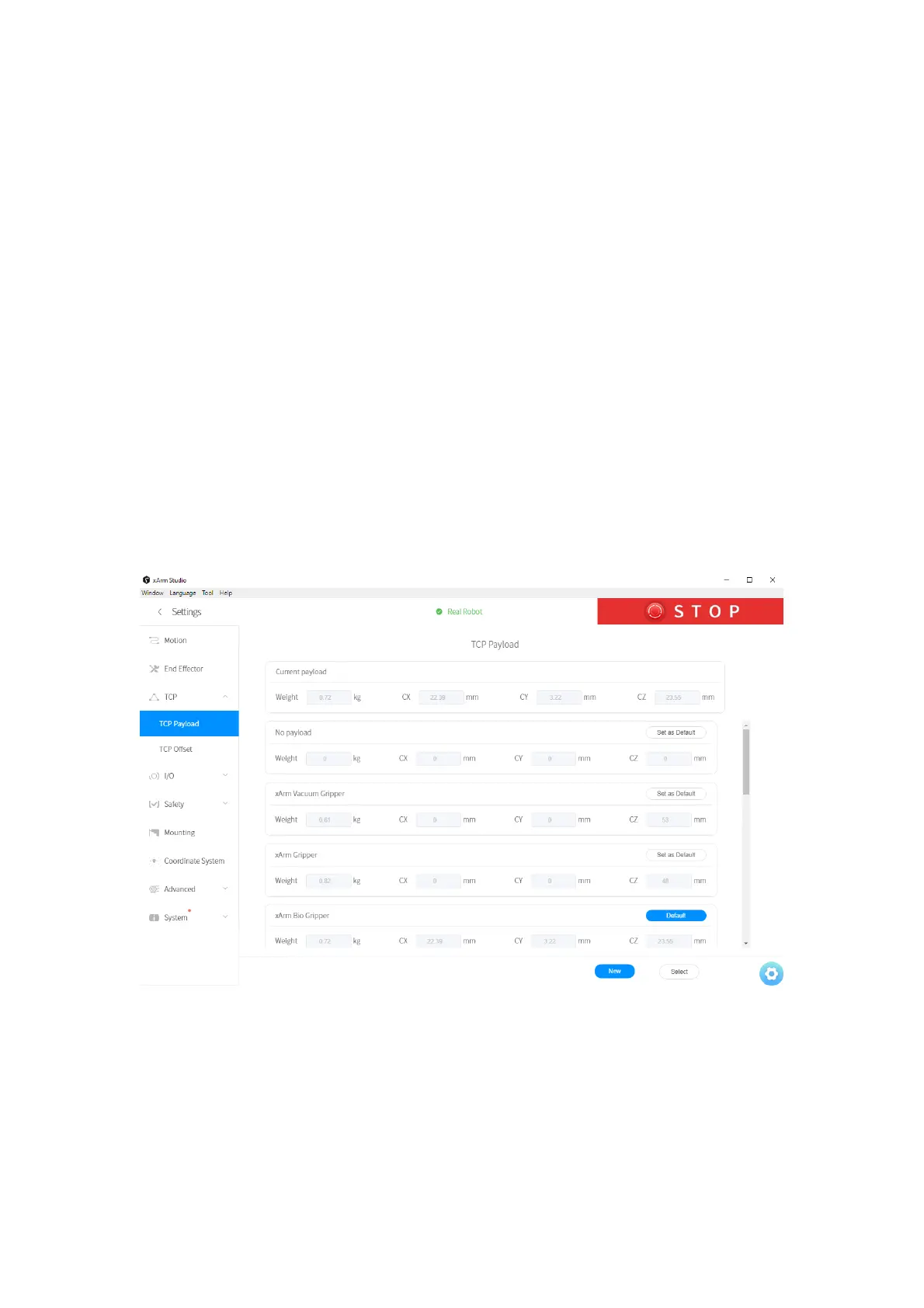
1.4.3.1 TCP Payload
On this page, the current payload of the robotic arm can be set and the
additional TCP payload data can be recorded. The additional TCP
payload data can be referenced during Blockly programming.