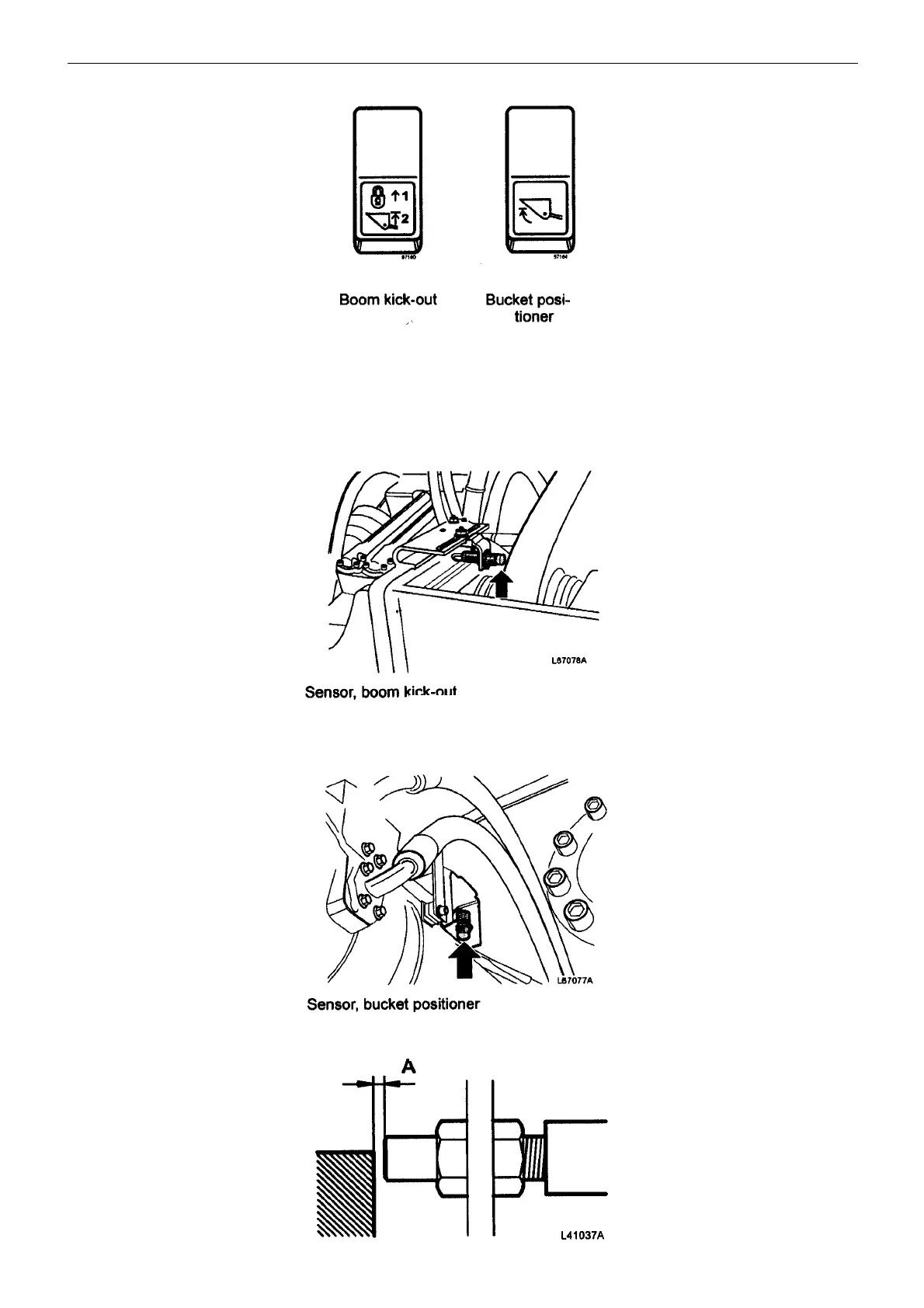
Boom kick-out and bucket positioner ﺖﮐﺎﺑ و مﻮﺑ ﻦﻣ ﻊﻄﻗ
58
ﺖﮐﺎﺑ و مﻮﺑ ﻦﮐ ﻊﻄﻗ
دﺮﮑﻠﻤﻋ ﻒﻗﻮﺗ ﺐﺟﻮﻣ ﺖﮐﺎﺑ و مﻮﺑ ﻦﮐ ﻊﻄﻗ ﺪﯿﻠﮐ
ﻦـﯿﯿﻌﺗ ﻞـﺒﻗ زا ﻪـﻄﻘﻧ رد ﺖﮐﺎـﺑ و مﻮﺑ ﮏﯿﺗﺎﻣﻮﺗا
هرود نﺪﺷ هﺎﺗﻮﮐ ﺚﻋﺎﺑ ﻞﻤﻋ ﻦﯾا . دﻮﺷ ﯽﻣ هﺪﺷ
ﯽﻣ ﺎﻬﻤﺘﺴﯿﺳ ﻦﯾا رد ﯽﮔدﻮﺳﺮﻓ ﺶﻫﺎﮐ و ﯽﻧﺎﻣز
ﺎـﯾ ﺖﮐﺎـﺑ زﺎﯿﻧ درﻮﻣ ﺖﯿﻌﺿو ﻢﯿﻈﻨﺗ ﺖﻬﺟ . دﻮﺷ
ﺮـﯾز یﺎـﻫ ﯽﯾﺎـﻤﻨﻫار ؛ ﺮـﺑ ﻻﺎـﺑ ﺮﻈﻧ درﻮﻣ عﺎﻔﺗرا
. ﺪﻨﺷﺎﺑ ﯽﻣ هﺪﻨﻨﮐ ﻦﯿﯿﻌﺗ
دﺮﮑﻠﻤﻋ
ﺎـﺑ ﺪﻨـﺷﺎﺑ هﺪـﺷ ﮏـﯾﺮﺤﺗ ﺎـﻫﺪﯿﻠﮐ ﻦــﯾا ﻪﮑﯿﻧﺎﻣز
رﻮـﯿﻟ ﺎـﯾ و (ﺮـﺑ ﻻﺎـﺑ ﺖﻟﺎــﺣ رد) مﻮﺑ رﻮﯿﻟ ﻦﺘﻓﺮﮔ
ﺖﻟﺎــﺣ رد ﺎـﻫرﻮﯿﻟ ؛ (ﻦـﮐ ﺮـﭘ ﺖﻟﺎـﺣ رد) ﺖﮐﺎـﺑ
ﺎـﺗ ﺖﮐﺎـﺑ و مﻮـﺑ ﺖـﮐﺮﺣ و هﺪـﺷ ﻞــﻔﻗ ﮏﯾﺮﺤﺗ
رد . ﺪﺑﺎﯾ ﯽﻣ ﻪﻣادا هﺪﺷ ﺺﺨﺸﻣ ﻞﺒﻗ زا ﺖﯿﻌﺿو
ﯽـﻣ ﺮـﺑ دﻮــﺧ صﻼﺧ ﺖﻟﺎﺣ ﻪﺑ ﺎﻫرﻮﯿﻟ نﺎﻣز ﻦﯾا
. ﺪﻧدﺮﮔ
(مﻮﺑ) ﺮﺑ ﻻﺎﺑ عﺎﻔﺗرا ﻢﯿﻈﻨﺗ
ﻻﺎـﺑ ﺮـﻈﻧ درﻮــﻣ هزاﺪﻧا ﺎﺗ ار ﺮﺑﻻﺎﺑ یﺎﻫوزﺎﺑ -1
. ﺪﯾﺮﺒﺑ
ﺖﻟﺎـﺣ رد ار ﭻﯿﺋﻮﺳ ﺎﻣا شﻮﻣﺎﺧ ار هﺎﮕﺘﺳد -2
. ﺪﯿﻫد راﺮﻗ زﺎﺑ
هدﻮﻤﻧ ﻞﺷ ار رﻮﺴﻨﺳ هﺪﻧراﺪﻬﮕﻧ ﻪﯾﺎﭘ هﺮﻬﻣ -3
. ﺪﯿﻧاﺮﺑ ﺐﻘﻋ ﻪﺑ ﺎﻬﺘﻧا ﺎﺗ ار رﻮﺴﻨﺳ و
. ﺪﯿﺋﺎﻤﻧ ﮏﯾﺮﺤﺗ ار مﻮﺑ ﻦﮐ ﻊﻄﻗ ﺪﯿﻠﮐ -4
ﻞــﻔﻗ ﺎﺗ هﺪﯿﺸﮐ ﺐﻘﻋ ﺖﻤﺳ ﻪﺑ ار مﻮﺑ رﻮﯿﻟ -5
. ددﺮﮔ
ﺎــﺗ هدﻮﻤﻧ ﺖﯾاﺪﻫ ﻮﻠﺟ ﺖﻤﺳ ﻪﺑ ار رﻮﺴﻨﺳ -6
. ددﺮﮔ (صﻼﺧ) دازآ مﻮﺑ رﻮﯿﻟ ﻪﮐ ﯽﯾﺎﺟ
ﻢـﮑﺤﻣ ار رﻮـﺴﻨﺳ هﺪـﻧراﺪﻬﮕﻧ ﻪــﯾﺎﭘ هﺮﻬﻣ -7
. ﺪﯿﺋﺎﻤﻧ
ﺖﮐﺎﺑ ﻦﮐ ﺮﭘ ﻦﮐ ﻊﻄﻗ
. ﺪﯿﻫد راﺮﻗ ﺮﻈﻧ درﻮﻣ ﺖﯿﻌﺿو رد ار ﺖﮐﺎﺑ -1
ﺖﻟﺎـﺣ رد ار ﭻﯿﺋﻮﺳ ﺎﻣا شﻮﻣﺎﺧ ار هﺎﮕﺘﺳد -2
. ﺪﯿﻫد راﺮﻗ زﺎﺑ
هدﻮﻤﻧ ﻞﺷ ار رﻮﺴﻨﺳ هﺪﻧراﺪﻬﮕﻧ ﻪﯾﺎﭘ هﺮﻬﻣ -3
. ﺪﯿﻧاﺮﺑ ﺐﻘﻋ ﻪﺑ ﺎﻬﺘﻧا ﺎﺗ ار رﻮﺴﻨﺳ و
. ﺪﯿﺋﺎﻤﻧ ﮏﯾﺮﺤﺗ ار ﺖﮐﺎﺑ ﻦﮐ ﻊﻄﻗ ﺪﯿﻠﮐ -4
ﺎـﺗ هﺪﯿـﺸﮐ ﺐـﻘﻋ ﺖﻤــﺳ ﻪﺑ ار ﺖﮐﺎﺑ رﻮﯿﻟ -5
. ددﺮﮔ ﻞﻔﻗ
ﺎــﺗ هدﻮﻤﻧ ﺖﯾاﺪﻫ ﻮﻠﺟ ﺖﻤﺳ ﻪﺑ ار رﻮﺴﻨﺳ -6
. ددﺮﮔ (صﻼﺧ) دازآ ﺖﮐﺎﺑ رﻮﯿﻟ ﻪﮐ ﯽﯾﺎﺟ
ﻢـﮑﺤﻣ ار رﻮـﺴﻨﺳ هﺪـﻧراﺪﻬﮕﻧ ﻪــﯾﺎﭘ هﺮﻬﻣ -7
. ﺪﯿﺋﺎﻤﻧ
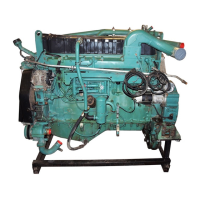
ﻪـﻌﻄﻗ و رﻮــﺴﻨﺳ ﻦﯿﺑ ﺎﻣ
(A)
ﻪﻠﺻﺎﻓ ! ﻢﻬﻣ
(0/12
–
0/20
in
) ﺪﯾﺎـــﺑ هﺎﮕﺘـﺳد کﺮـﺤﻣ
ﻪــﻈﺣﻼﻣ ار وﺮﺑور ﺮﯾﻮﺼﺗ . ﺪﺷﺎﺑ 3-5
mm
. ﺪﯿﺋﺎﻤﻧ
Boom kick-out and
bucket positioner
Boom kick-out and bucket positioner
causes the bucket and the lifting arms
automatically to stop in
predetermined positions. This will
result in shorter cycle times and
reduces wear. The adjustments of the
required position for the bucket or the
required height when lifting are done
according to the instructions given
below.
Operation
• When either of the control levers is
moved to lifting or tilting rearwards
(with switched on switches) the lever
is kept in the detent position and the
movement continues to a
predetermined position, whereafter
the lever returns to neutral.
Adjusting lift height
1 Raise the lifting arms to the
required position.
2 Stop the engine, but leave the
ignition key in running position.
3 Slacken the nut for the bracket and
move the sensor to its rear position.
4 Switch on the switch for the boom
kick-out.
5 Move the lifting lever to the rear
detent position.
6 Displace the sensor forward until
the lifting lever returns to neutral.
7 Tighten the nut for the bracket.
Adjusting tilting rearwards
1 Move the bucket to the required
position.
2 Stop the engine, but leave the
ignition key in running position.
3 Slacken the nuts for the bracket
and move the sensor to its rear
position.
4 Switch on the switch for the bucket
positioner.
5 Move the tilting lever to the rear
detent position.
6 Displace the sensor toward the rod
until the light emitting diode lights up.
7 Tighten the nuts for the bracket.
IMPORTANT! The distance (A)
between the sensors and the
actuating part of the machine
should be 3-5 mm (0.12-0.20 in).
See the adjacent figure.
ﺖﮐﺎﺑ ﻦﮐ ﻊﻄﻗ مﻮﺑ ﻦﮐ ﻊﻄﻗ
مﻮﺑ ﻦﮐ ﻊﻄﻗ رﻮﺴﻨﺳ
ﺖﮐﺎﺑ ﻦﮐ ﻊﻄﻗ رﻮﺴﻨﺳ