Manual 37278B GCP-30 Series - Genset Control
Page 32/174 © Woodward
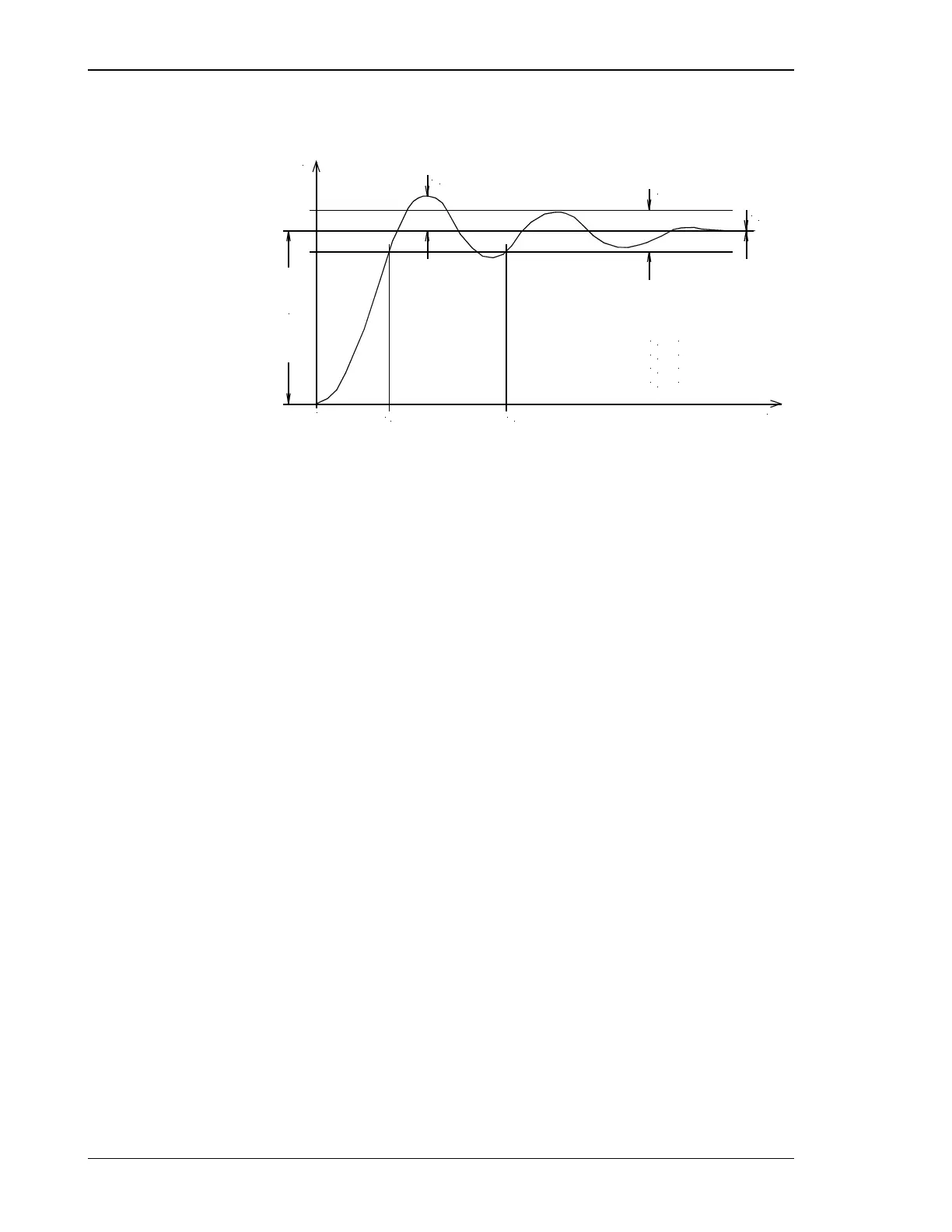
If an abrupt disturbance variable is applied to the control loop, the reaction of the controlled system can be rec-
orded at the output as a function of time (step response).
0
t/s
x
T
T
T
x
x
d
m
x
d
x
m
T
Rise time
Overshoot
System deviation
rise
rise
Tolerance band
Settling time
sett
sett
disturbance variable
Figure 3-2: Step response (Example)
Various values can be obtained from the step response; these are required for adjusting the controller to its opti-
mum setting:
Rise time T
rise
: Period starting when the value of the control variable leaves a predefined tolerance range for the
control variable following a step in the disturbance variable or reference input variable and ending the first time
the value re-enters this range.
Settling time T
sett
: Period starting when the value of the control variable leaves a predefined tolerance range for
the control variable following a step in the disturbance variable or reference input variable and ending when the
value re-enters this range permanently.
Overshoot x
m
: Highest transient set point value deviation during the transition from one steady-state condition to
a new steady-state condition following modification of the disturbance variable or reference input variable (x
m Op-
timal
≤ 10 %).
System deviation x
d
: Permanent deviation from the final value (PID controller: x
d
= 0).
The values for K
PR
, T
n
, and T
V
may be determined through various calculations from the values in the table
above. Through these calculations (calculating compensation, adjustment of the time constants, T-sum rule,
symmetric optimum, and/or Bode-diagram) it is possible to determine the optimal controller settings. Other set-
ting procedures and information may be obtained from current literature.

 Loading...
Loading...










